6-3
6 Process Data Communications and SDO Communications
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
6-1 Process Data Communications (PDO Communications)
6
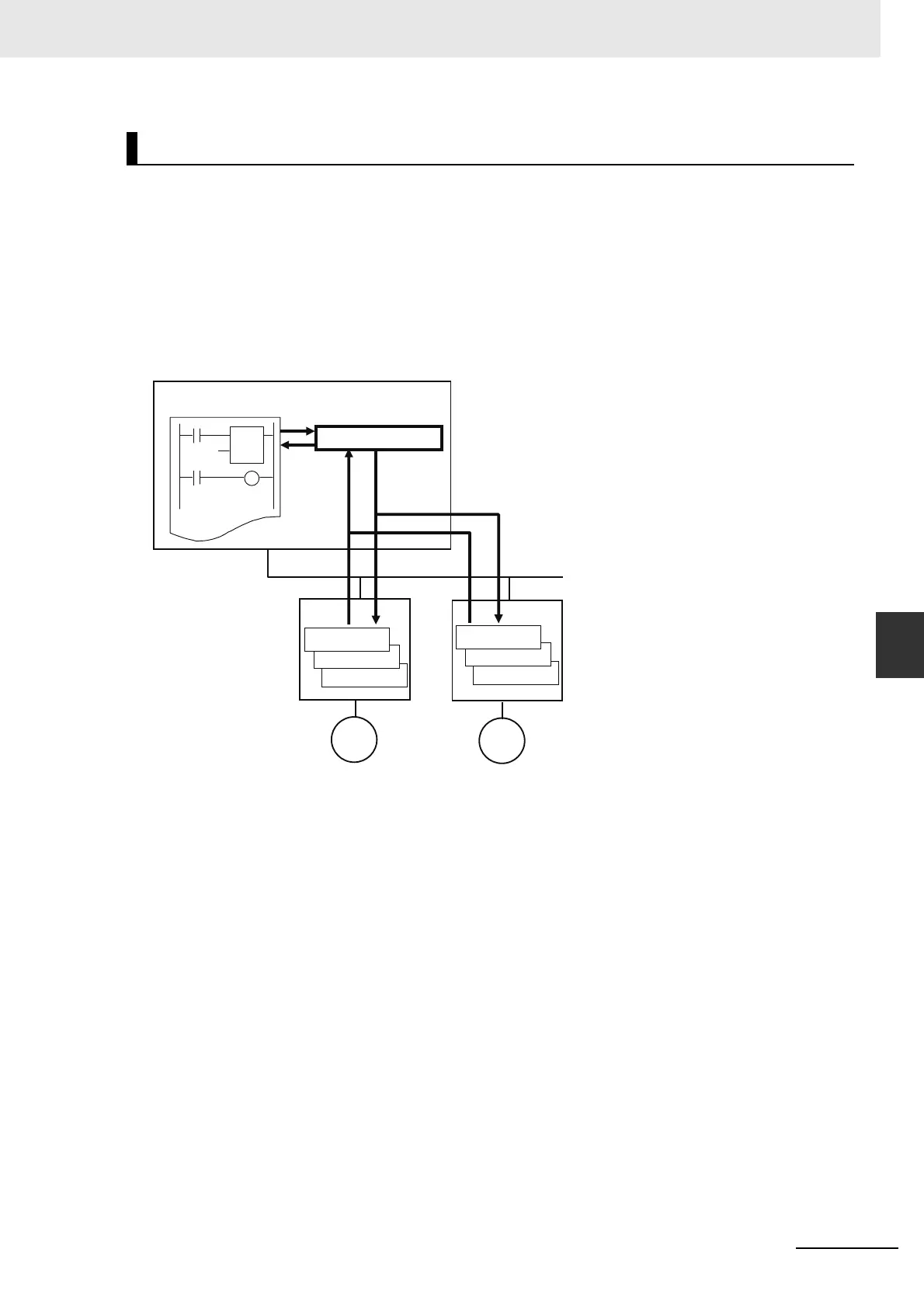
6-1-1 Allocated Variables for Process Data Communications
Servo Drives and encoder input slaves that are assigned to axes on EtherCAT can be controlled by
specifying Axis Variables (structures) as parameters for motion control instruction in-out variables.
Axis Variables (structures) consist of the following data.
• Parameters: Maximum acceleration rate, software limits, etc.
• I/O: Home proximity input, Servo ON, etc.
• Operating status: Accelerating, waiting for in-position state, etc.
• Error and warning status: Excessive following error, acceleration error, etc.
Axis Variables
EtherCAT
Process data
Process data
Process data
Process data
Process data
Process data
Servo Drive/encoder input
slave
Servo Drive/encoder input
slave
Axis Variables (structures)
Reading, writing, and commands
User program
NJ/NX-series CPU Unit

 Loading...
Loading...








