3 EtherCAT Communications
3-8
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
3-2 Programming EtherCAT
Communications
The user program in the NJ/NX-series CPU Unit reads/writes EtherCAT slave data and performs
motion control for Servo Drive and encoder input slaves.
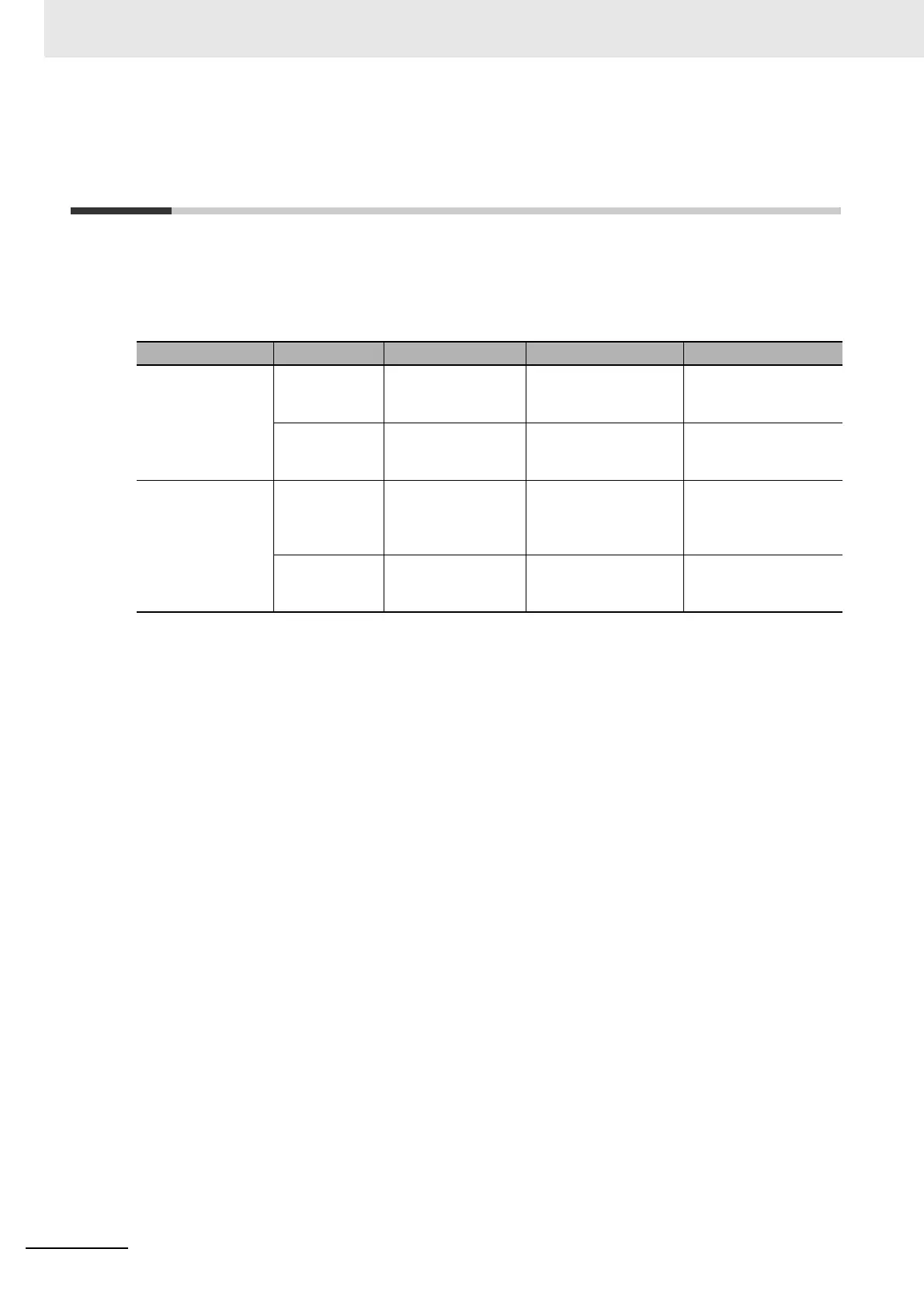
Instructions and variables are used according to slave types and target data as shown below.
Slave type Type of data Timing Instructions Variables
Slaves to which you
cannot assign axes
Process data Constantly
read/written
Read/write instructions
such as LD, OUT and
MOV
Device variables
SDO data Read/written as
required
EtherCAT instructions
(EC_CoESDORead or
EC_CoESDOWrite)
User-defined variables
Slaves to which you
can assign axes
Process data Constantly
read/written
Motion control instruc-
tions or read/write
instructions such as
LD, OUT and MOV
Axis Variables or
device variables
SDO data Read/written as
required
EtherCAT instructions
(EC_CoESDORead or
EC_CoESDOWrite)
User-defined variables

 Loading...
Loading...








