8 Example of Operations for EtherCAT Communications
8-4
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
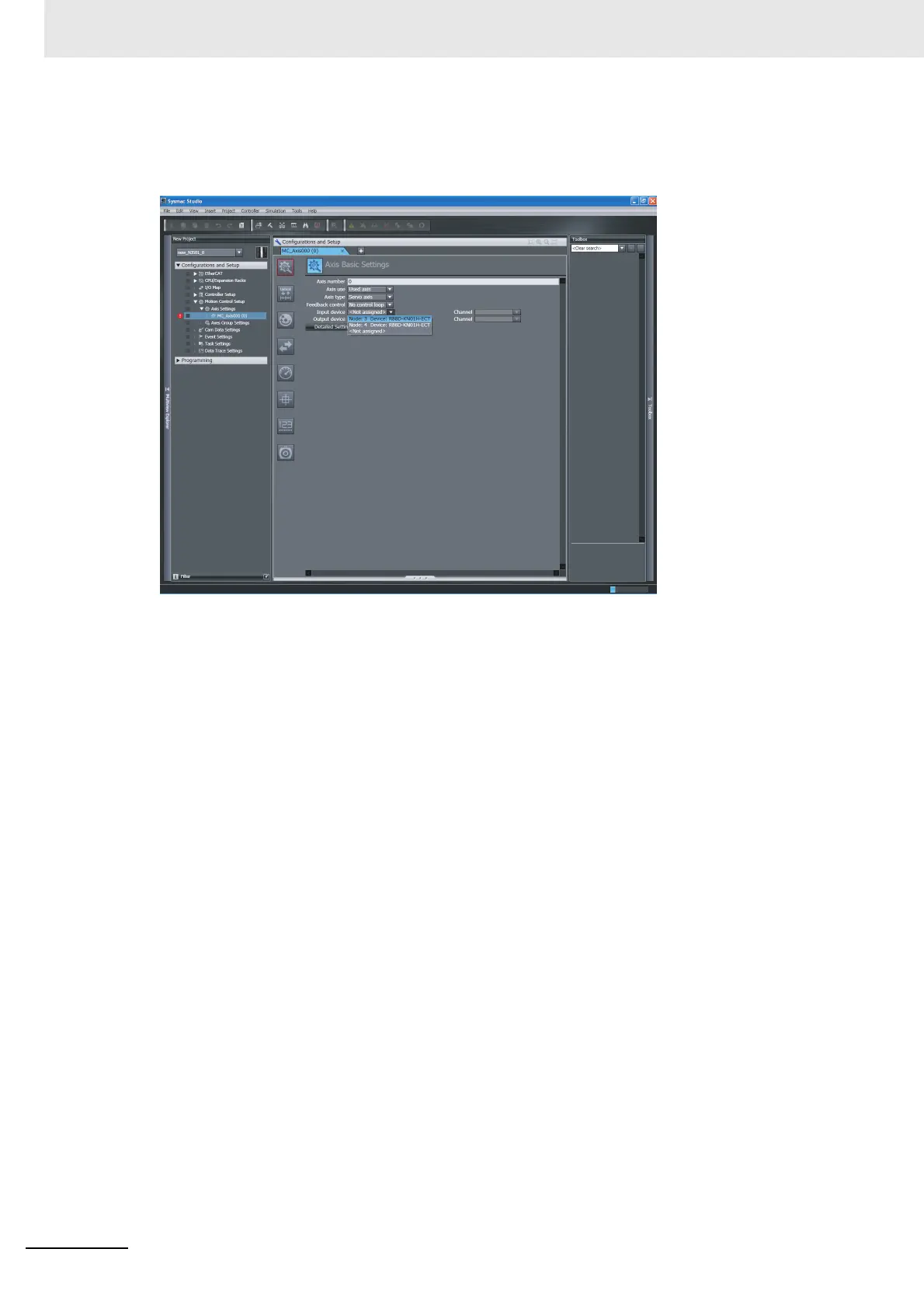
Axis Settings for the Servo Drives (Node Addresses 3 and 4)
Add an axis to the Motion Control Setup and then assign the Servo Drive with node address 3 to the
axis to set the axis.
In the same way, add an axis and assign the Servo Drive with node address 4 to it.
Setting EtherCAT Master Parameters
Set the parameters for the EtherCAT master from the EtherCAT master settings.
Setting Slave Parameters
Set the slave parameters from the EtherCAT configuration slave settings. If a communications error
prevents the slaves from receiving signals from the EtherCAT master, the slave settings will control
the slave outputs.
Assigning Tasks to Slaves
Use Task Settings to assign tasks to slaves.
•Set Period/Execution Conditions for each task from Task Settings.
• Set names of the tasks that are assigned to the slaves from I/O Control Task Settings.

 Loading...
Loading...








