Configuring
6.1 Communication telegrams
F-TM ServoDrive
52 Equipment Manual, 02/2020, A5E47579503-AA
Configuring the F-TM ServoDrive (minimal configuration)
To configure a F-TM ServoDrive, follow these steps:
1. Create a new project.
2. Add a CPU S7-1200 or S7-1500 as a new device.
3. Add a PROFINET interface module to the project under "Devices & networks" from the
ET200SP system, e.g. IM 155-6PN ST.
4. Assign the inserted IO device to the configured IO controller.
5. Switch to the device view of the interface module.
6. Add the F-TM ServoDrive module from the hardware catalog to the IO device.
7. Add a server module.
6.1 Communication telegrams
Selection of a communication telegram
The selection of a communication telegram determines the process data of the drive that will
be transmitted between the drive and CPU.
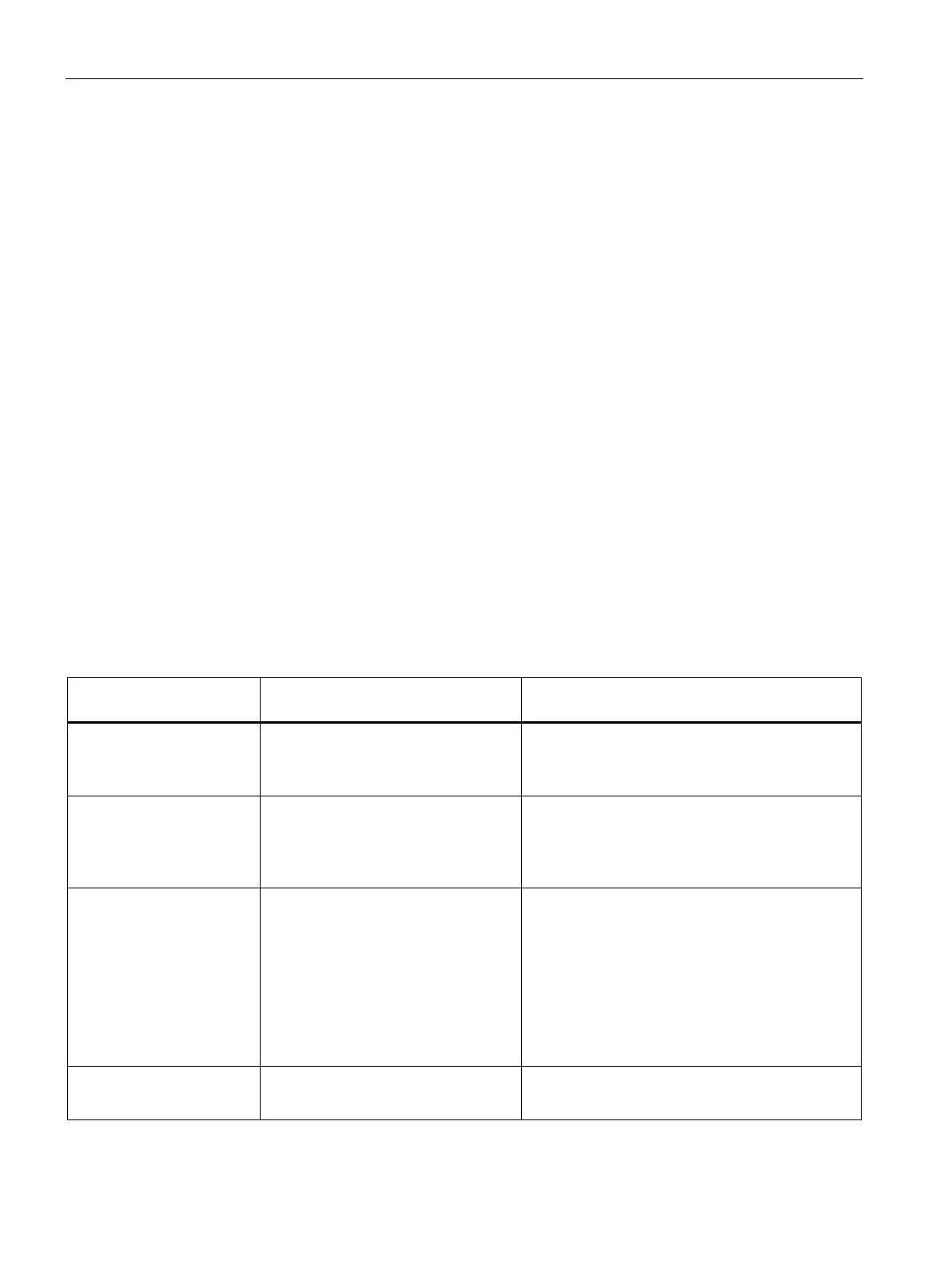
The following table shows the supported telegram types for the drive and sensor
assignment.
Table 6- 1 Supported communication telegrams
Supported PROFIdrive
telegrams
Standard telegram 1
PZD-2/2
Speed setpoint 16 bits, without sensor
• Control word STW1, status word ZSW1
• Speed setpoint 16 bits (NSET), actual speed
value 16 bits (NACT)
Standard telegram 2
PZD-4/4
Speed setpoint 32 bits, without posi-
tion encoder
• Control words STW1 and STW2, status words
ZSW1 and ZSW2
• Speed setpoint 32 bits (NSET), actual speed
value 32 bits (NACT)
Standard telegram 3
PZD-9/5
Speed setpoint, 32 bits with one posi-
tion encoder
• Control words STW1 and STW2, status words
ZSW1 and ZSW2
• Speed setpoint 32 bits (NSET), actual speed
value 32 bits (NACT)
• Encoder control word 1 (G1_STW), encoder
status word 1 (G1_ZSW)
• Actual encoder position value 1 (G1_XIST1,
G1_XIST2)
Extension word Status bits of the inputs
• Bit 0: DI
• Bit 1: STO
A PZD (process data word) corresponds to a 16-bit word.

 Loading...
Loading...






