Getting Started
62 A5E37208904-003, 04/2017
Initial commissioning in JOG mode
Prerequisites
● The servo drive is connected to the servo motor without load
● The servo drive is not in servo on status
Note
Set bit 0 of parameter p29108 to 1, and then save the parameter setting and restart the drive, to enable the JOG function;
otherwise, you cannot access the function related parameter p1058.
If you have assigned digita
l signal EMGS, keep it at a high level (1) to ensure normal operation.
1 Connect necessary units and check wiring. It is necessary to connect the following cables:
• Power cable
• Encoder cable
• Brake cable
• Line supply cable
•
2 Switch on the 24 VDC power supply.
3 Check the servo motor type.
• If the servo motor has an incremental encoder, input
motor ID (p29000).
• If the servo motor has an absolute encoder, the servo
drive can identify the servo motor automatically.
occurs when the servo motor is not
identified.
You can find the motor ID from the motor rating
plate. Go to "Motor components (Page 14)" for
detailed descriptions about motor rating plate.
4 Check the direction of motor rotation.
The default direction of rotation is CW (clockwise). You can
change it by setting the parameter p29001 if necessary.
p29001=0: CW
p29001=1: CCW
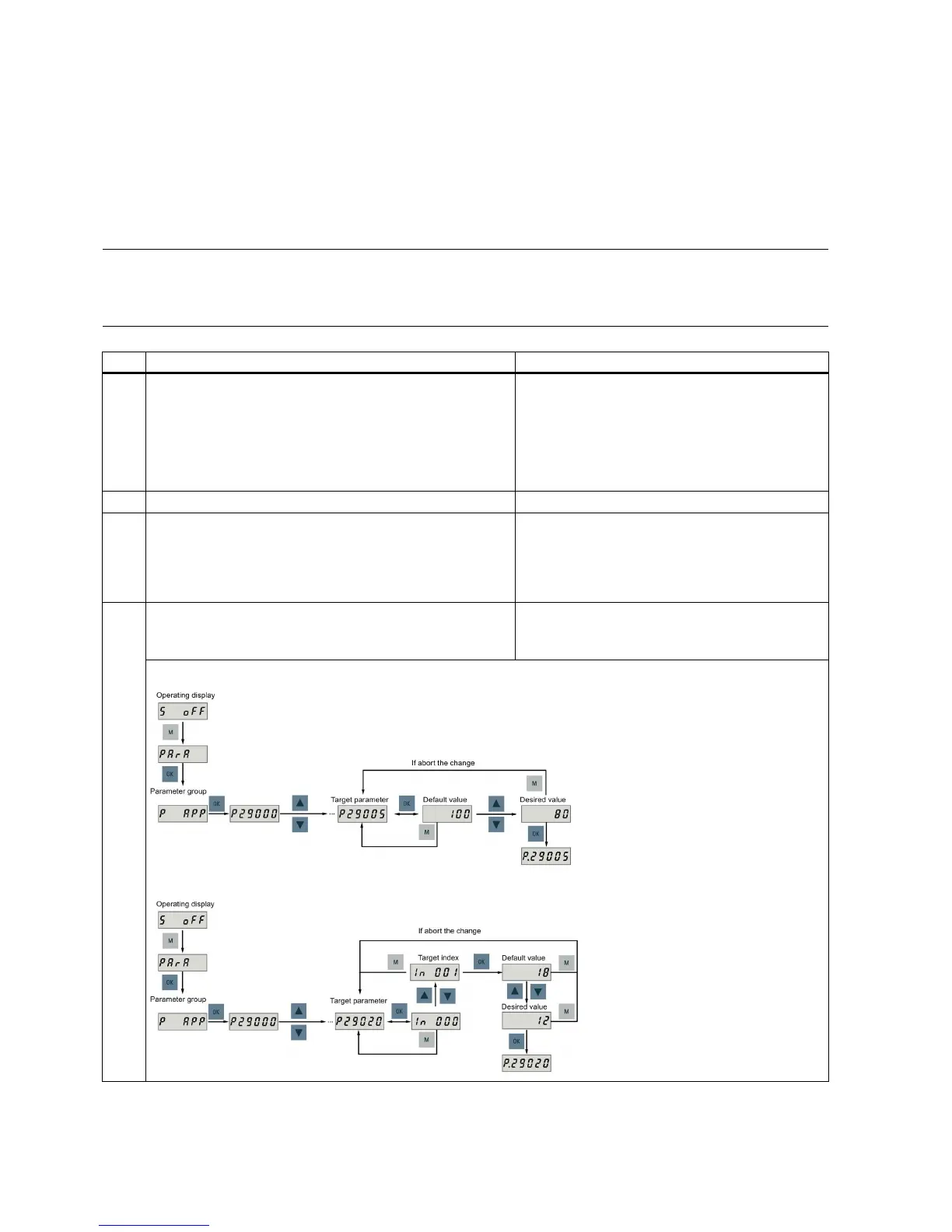
Setting a parameter without index (example)
Setting a parameter with index (example)

 Loading...
Loading...









