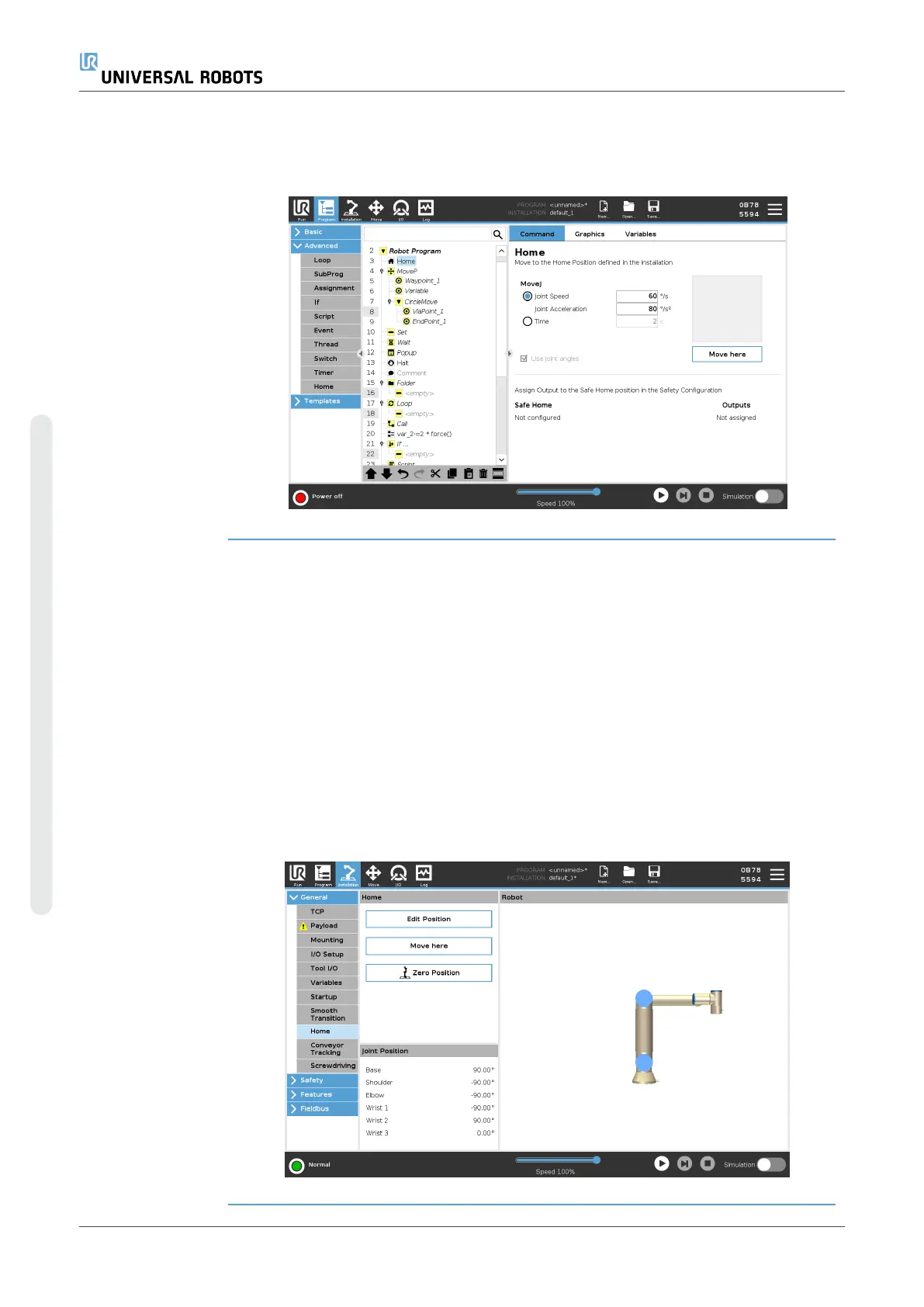
Description The Home node uses joint angles to move the robot to a predefined Home position. If
defined as a Safe Home position,the Home node displays as Home(Safety) in the
Program Tree. If the Home position is out of sync with Safety, the node is undefined.
Defining Home Home is a user-defined return position for the Robot Arm. Once defined, the Home
Position is available when creating a robot program. You can use the Home Position to
define a Safe Home Position. (See17.9 Safe Home Positionon page167) Use the
Home screen buttons for the following:
•
Edit Position modifies a Home Position.
•
Move here moves the Robot Arm to the defined Home Position.
•
Zero Position returns the Robot Arm to an upright position.
1. In the Header, tap Installation.
2. Under General, select Home.
3. Tap Set Position.
4. Teach robot using either Freedrive or Transition buttons.
UR10e 248 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










