20.7. Tool I/O
Description The I/O Interface Control allows you to switch between user control and URcap
control.
I/O Interface
Control
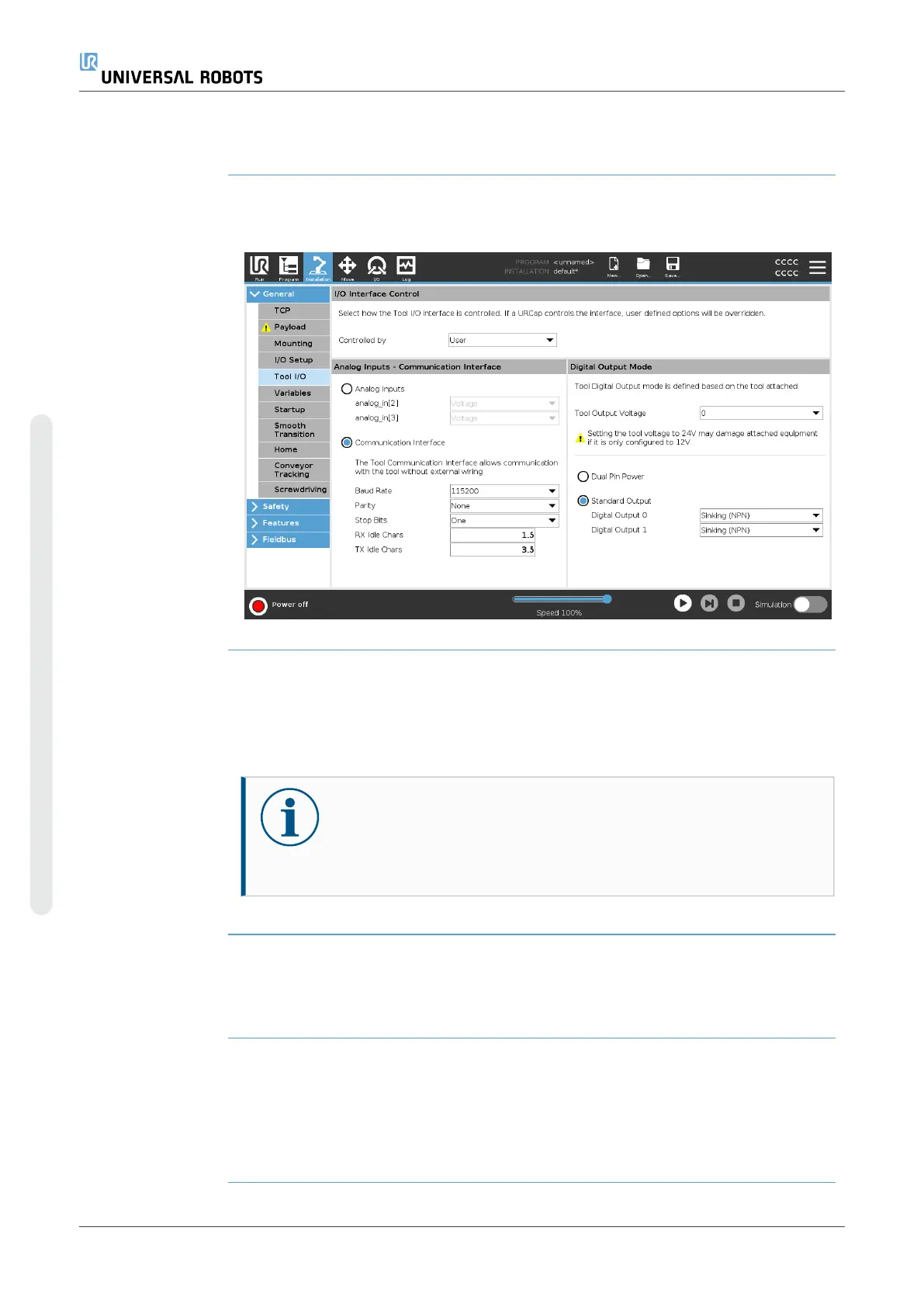
1. Tap the Installation tab and under General, tap Tool I/O
2. Under I/O Interface Control, select User to access the Tool Analog Inputs and/or
Digital Output Mode settings. Selecting a URCap removes access to the Tool
Analog Inputs and the Digital Output Mode settings.
NOTICE
If a URCap controls an end-effector, such as a gripper, then the
URCap requires control of the Tool IO Interface. Select the URCap in
the list, to allow it to control the Tool IO Interface.
20.7.1. Analog Input - Communication Interface
Description The Tool Communication Interface (TCI) enables the robot to communicate with an
attached tool via the robot tool analog input. This removes the need for external
cabling.
Once the Tool Communication Interface is enabled, all tool analog inputs are
unavailable
UR10e 292 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










