To power down
the robot arm
WARNING
Unexpected start-up and/or movement can lead to injury
•
Power down the robot arm to prevent unexpected start-up
during mounting and dismounting.
1. Press the power button on the Teach Pendant to turn off the robot.
2. Unplug the mains cable / power cord form the wall socket.
3. Allow 30 seconds for the robot to discharge any stored energy.
To secure the
robot arm
1. Mount the robot on a sturdy, vibration-less, surface that can withstand at least
ten times the full torque of the base joint and at least five times the weight of the
robot arm.
If the robot is mounted on a linear axis, or a moving platform, then the
acceleration of the moving mounting base is very low. High acceleration might
cause the robot to make a safety stop.
2. Tighten the bolts to 20Nm torque. (Torque values have been updated SW5.14.
Earlier printed version will show different values)
3. Use the two Ø8 holes provided, with a pin, to accurately reposition robot arm.
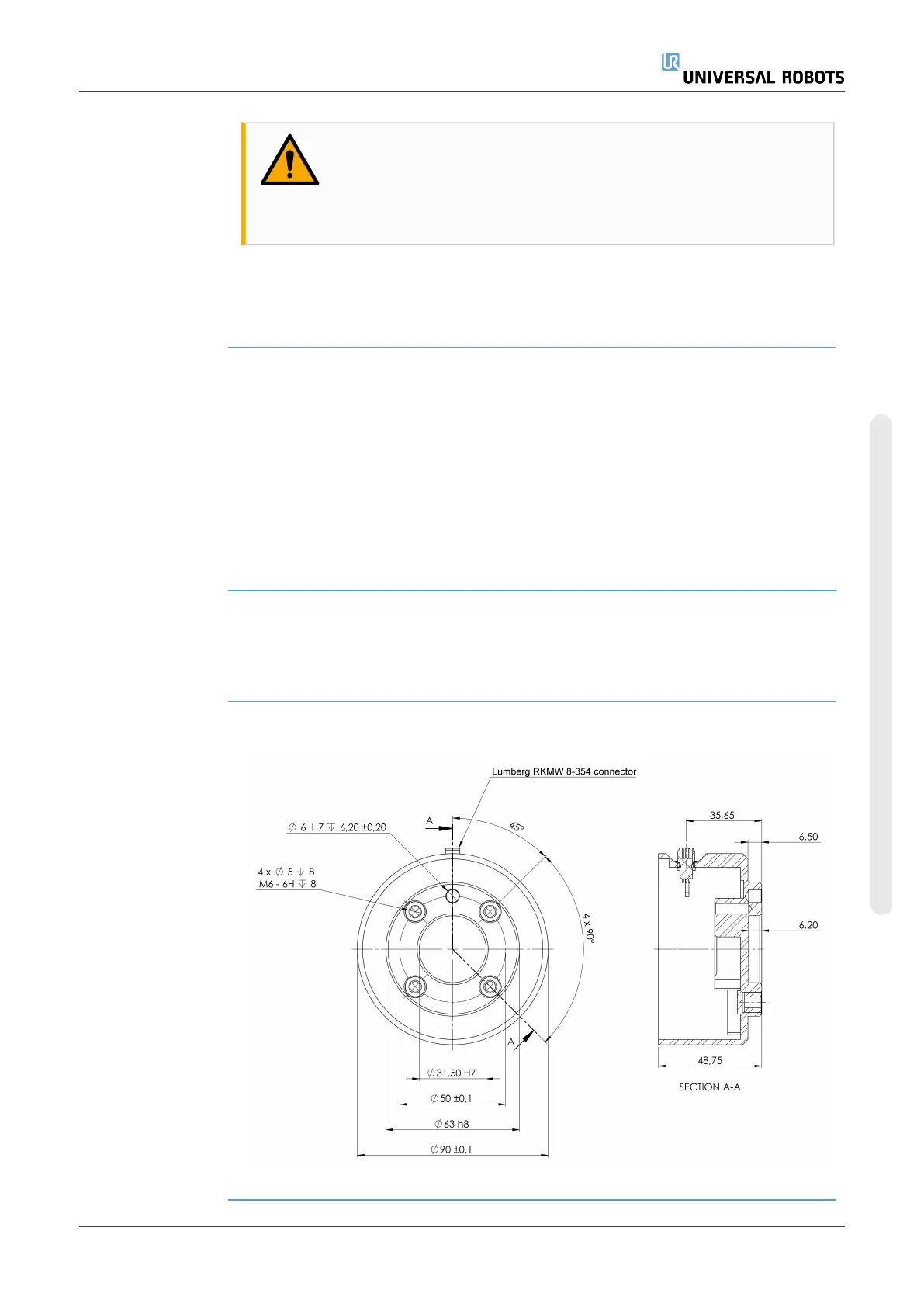
3.4. Securing Tool
Description The tool or workpiece is mounted to the tool output flange (ISO 9409-1) at the tip of the
robot.
Dimensions and hole pattern of the tool. All measurements are in millimeters.
User Manual 41 UR10e
3.Mechanical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










