4.16. Tool Digital Inputs
Description The Startup screen contains settings for automatically loading and starting a default
program, and for auto-initializing the Robot arm during power up.
Table The Digital Inputs are implemented as PNP with weak pull-down resistors. This means
that a floating input always reads as low. The electrical specifications are shown below.
Parameter Min Type Max Unit
Input voltage -0.5 - 26 V
Logical low voltage - - 2.0 V
Logical high voltage 5.5 - - V
Input resistance - 47k -
Ω
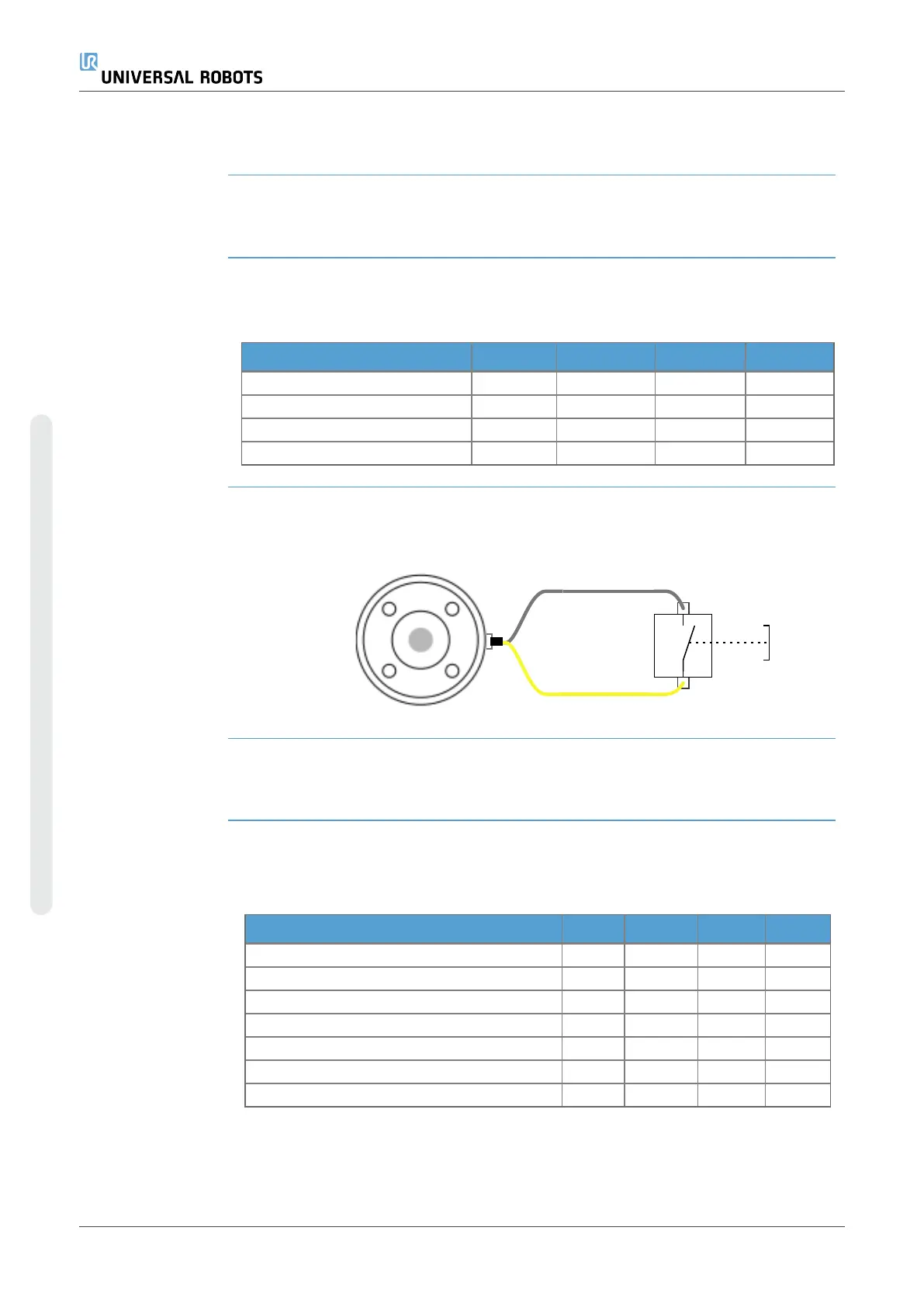
Using the Tool Digital
Inputs
This example illustrates connecting a simple button.
4.17. Tool Analogue Inputs
Description Tool Analogue Input are non-differential and can be set to either voltage (0-10V) or
current (4-20mA) on the I/O tab (see part Part II PolyScope Manual). The electrical
specifications are shown below.
Parameter Min Type Max Unit
Input voltage in voltage mode -0.5 - 26 V
Input resistance @ range 0V to 10V - 10.7 - k
Ω
Resolution - 12 - bit
Input voltage in current mode -0.5 - 5.0 V
Input current in current mode -2.5 - 25 mA
Input resistance @ range 4mA to 20mA - 182 188
Ω
Resolution - 12 - bit
Two examples of using Analog Input are shown in the following subsections.
UR10e 68 User Manual
4. Electrical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...









