78 www.xilinx.com RocketIO™ Transceiver User Guide
UG024 (v3.0) February 22, 2007
Chapter 2: Digital Design Considerations
R
.
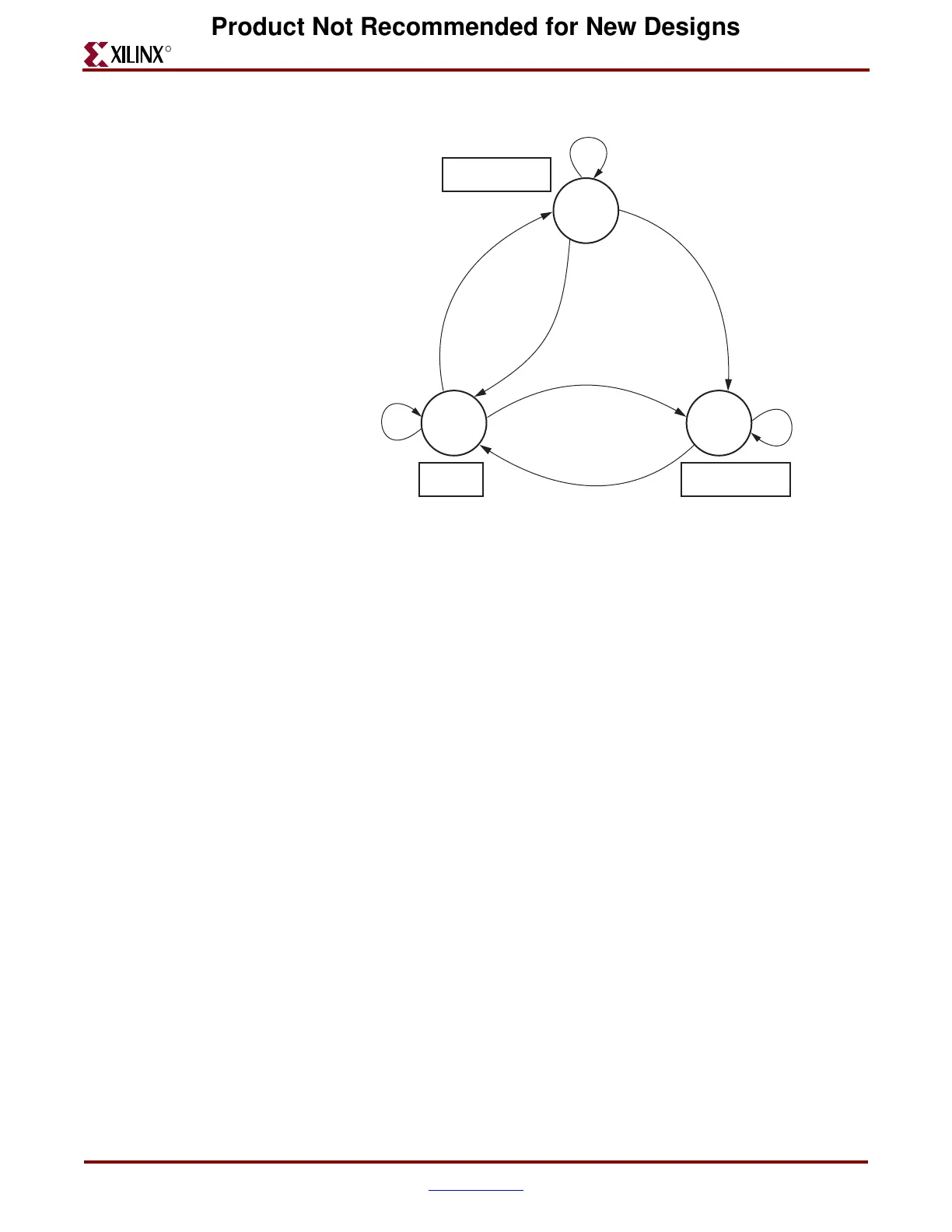
SYNC_ACQUIRED (RXLOSSOFSYNC = 00)
In this state, a counter is decremented by 1 (but not past 0) for a valid received symbol and
incremented by RX_LOS_INVALID_INCR for an invalid symbol. If the count reaches or
exceeds RX_LOS_THRESHOLD, the FSM moves to state LOSS_OF_SYNC. Otherwise, if a
channel bonding (alignment) sequence has just been written into the elastic buffer, or if a
comma realignment has just occurred, the FSM moves to state RESYNC. Otherwise, the
FSM remains in state SYNC_ACQUIRED.
RESYNC (RXLOSSOFSYNC = 01)
The FSM waits in this state for four RXRECCLK cycles and then goes to state
SYNC_ACQUIRED, unless an invalid symbol is received, in which case the FSM goes to
state LOSS_OF_SYNC.
LOSS_OF_SYNC (RXLOSSOFSYNC = 10)
The FSM remains in this state until a comma is received, at which time it goes to state
RESYNC.
Figure 2-21: RXLOSSOFSYNC FSM States
00
01 10
SYNC_ACQUIRED
RESYNC LOSS_OF_SYNC
count < RX_LOS_THRESHOLD
count = RX_LOS_THRESHOLD
no comma received
comma received
invalid data
valid data + < 4 RXRECCLK cycles
valid data + 4 RXRECCLK cycles
UG024_40_031803
channel alignment
or
comma realignment
Product Not Recommended for New Designs
 Loading...
Loading...
