4.6.2 Exercise 4: part feature with simple rotation
About the exercise
In this example a simple path with two points will be moved in translation as well
as in rotation.
Instructions
Action
Create a new routine called disp_ex4 that looks like this:
PROC disp_ex4()
MoveJ *, v200, fine, tWeldGun;
1
MoveL *, v200, fine, tWeldGun;
! Search 1
Search_1D peEX1, *, *, v200, tWeldGun;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun;
! Search 2
Search_1D peEX2, *, *, v200, tWeldGun\PrePDisp:=peEX1;
MoveL *, v200, fine, tWeldGun;
MoveL *, v200, fine, tWeldGun;
! Search 3
Search_1D peEX3, *, *, v200, tWeldGun\PrePDisp:=peEX1;
MoveL *, v200, fine, tWeldGun;
MoveL *, v200, fine, tWeldGun;
PDispSet peEX2;
! Corner 1
MoveL P1, v200, fine, tWeldGun;
PDispSet peEX3;
! Corner 2
MoveL P2, v20, fine, tWeldGun;
PDispOff;
MoveL *, v200, fine, tWeldGun;
ENDPROC
Three displacement frames will be used, peEX1, peEX2, and peEX3. You will need
to create these if they do not exist in the system. Be careful that the correct pre-dis-
placement is called for each search instruction.
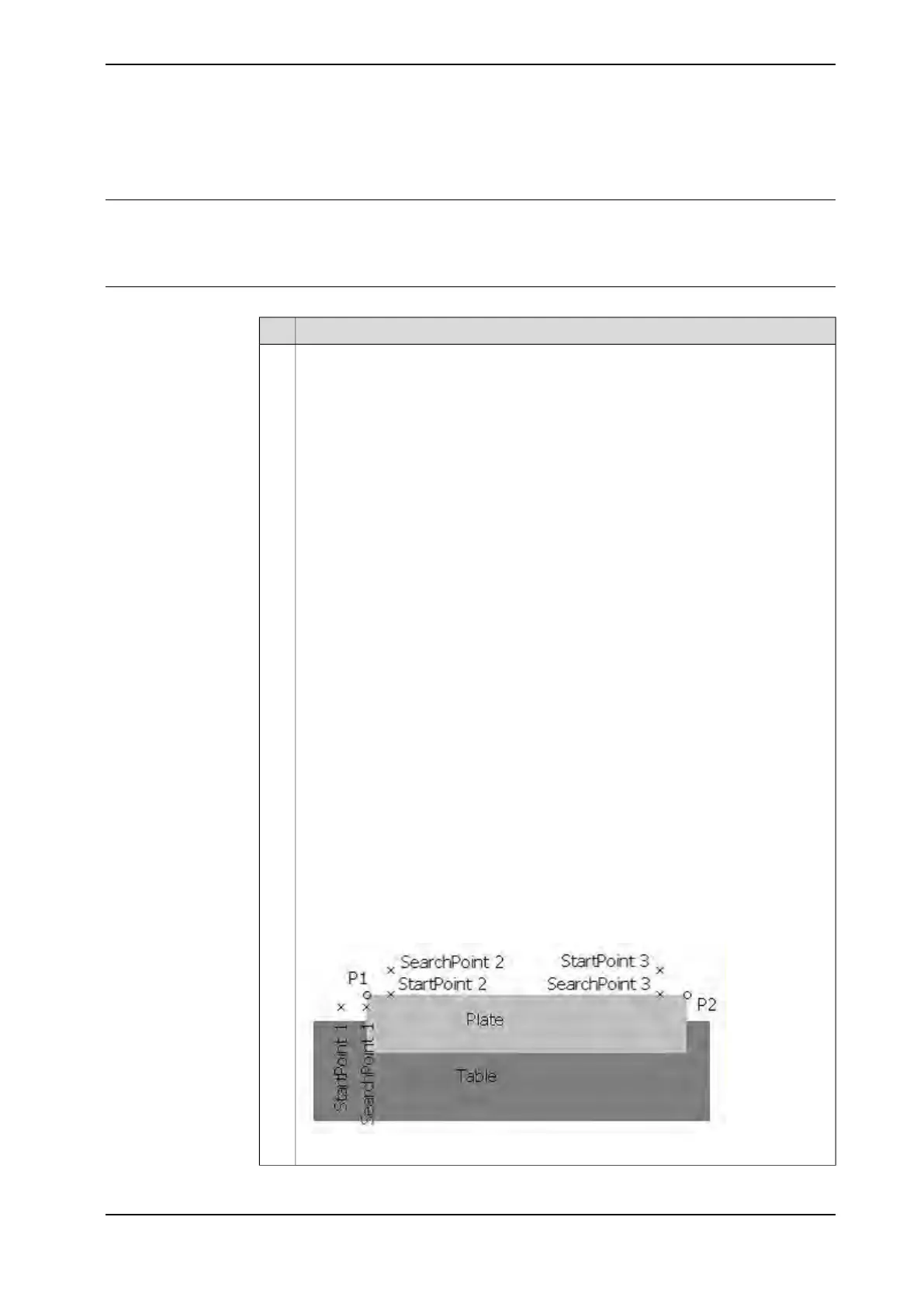
The searches should look similar to those used in exercise 2 & 3 (see on page 45),
but positioned around the plate like this:
xx1400001507
Continues on next page
Application manual - SmarTac 57
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.6.2 Exercise 4: part feature with simple rotation