4.7 Exercise 5: using SmarTac with work object manipulation
4.7.1 Introduction
Weld paths
Sometimes using multiple displacement frames can not provide an easy way of
determining a weld seam's location. In exercise 4 we proved that a simple weld
path could be moved in translation and rotation using two displacement frames;
one for the start and one for the end of the weld path. If the weld were not
continuous, that is a stitch weld, this would not work. There is no displacement
information about the intermediate weld points.
Work object
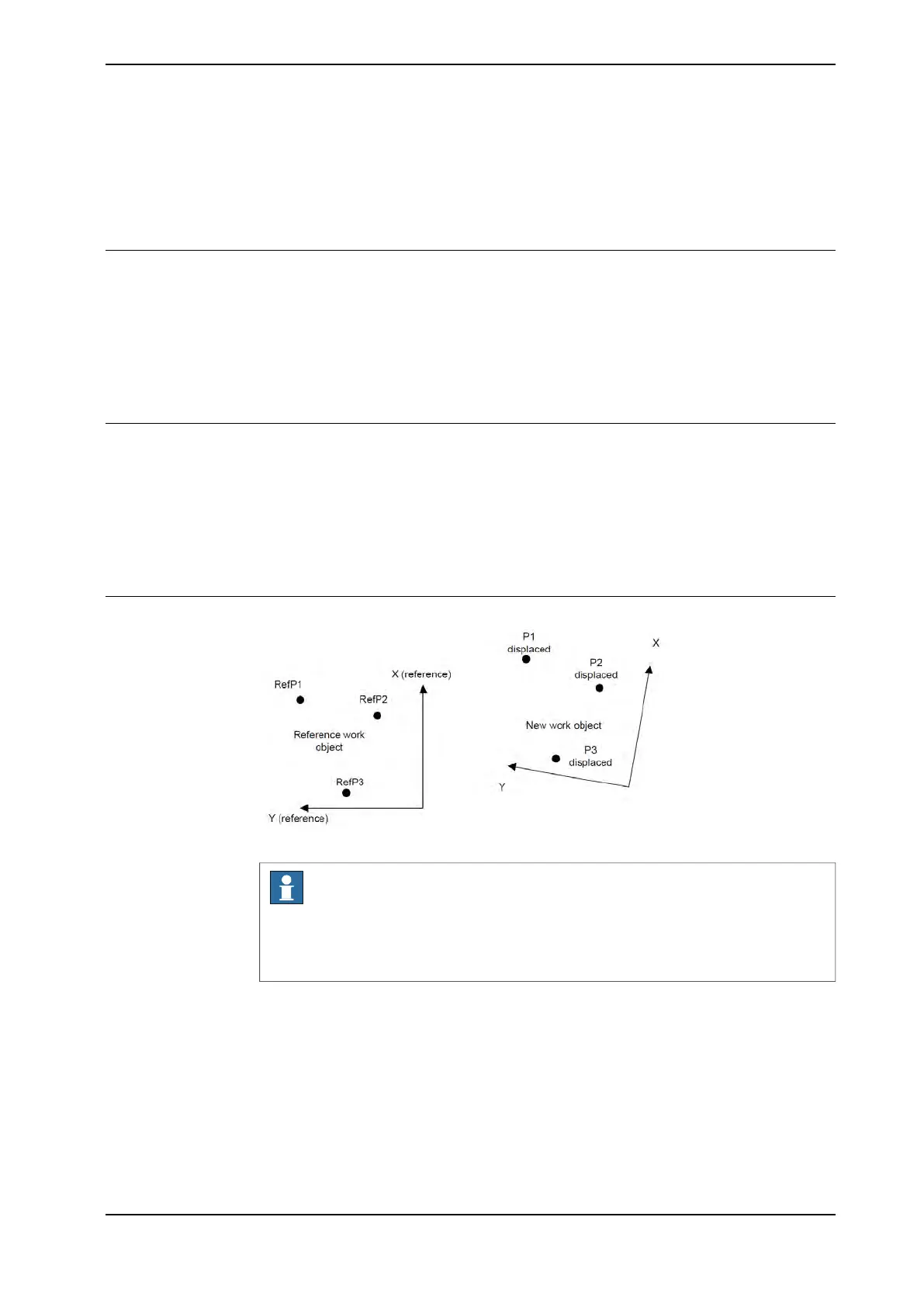
In some cases it is necessary to determine how the whole part has moved in
translation and rotation. The best way to do this is to use a work object to describe
where the part is in relation to the world frame. Based on search information, the
object frame of a work object can be moved in translation and rotation. If the weld
sequence in written in this work object, the points in the sequence will move with
changes to the work object.
Example 1
xx1400001508
Note
An important benefit to this technique is that searching and program
displacements can still be used for features on the part after the part program
has been rotated in the work object.
Continues on next page
Application manual - SmarTac 59
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.7.1 Introduction