Behavior models used in CIP Motion
54 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
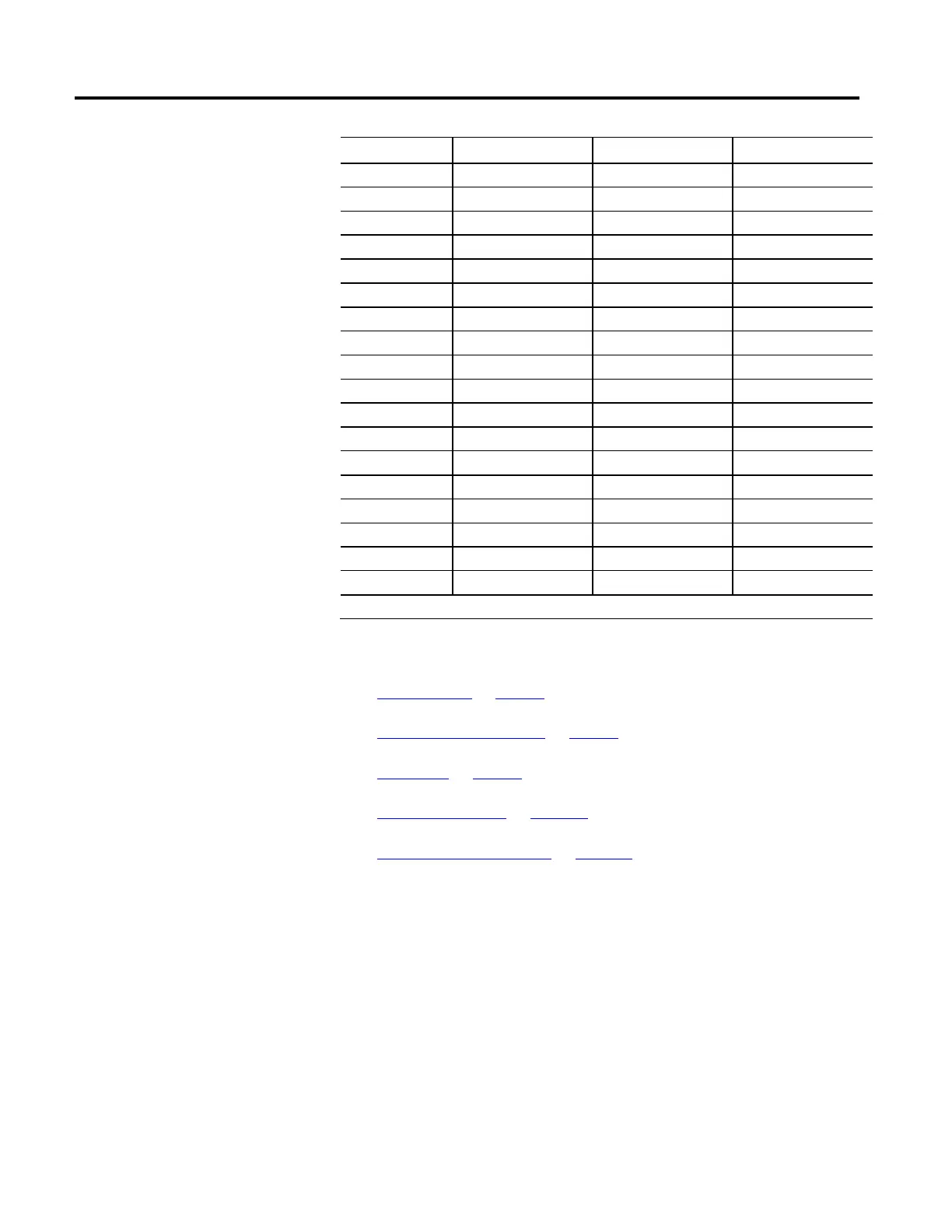
Current State Event Conditions Next State
Starting Disable
Stopping
Starting Start Complete In Process = 0 Running
Starting Start Complete In Process = 1 Testing
Stopping Stop Complete Shutdown = 0 Stopped
Stopping Stop Complete Shutdown = 1 Shutdown
Stopping Major Fault
Aborting
Stopping Enable Flying Start Enable = 1 Starting
Aborting Stop Complete
Major Faulted
Aborting Fault Reset
Stopping
Testing Shutdown
Stopping
Testing Major Fault
Aborting
Testing Disable
Stopping
Testing Test Complete
Stopping
Running Shutdown
Stopping
Running Major Fault
Aborting
Running Disable
Stopping
Any State Connection Close
Initializing
Any State Connection Loss
Major Faulted
* Event disables the axis power structure after a Category 2 Stop leaves the axis in active hold condition.
See also
State Behavior on page 61
Fault and Alarm Behavior on page 41
Exceptions on page 41
Stopping Sequences on page 445
CIP Axis Status Attributes on page 236
When the Motion Control Axis is not actively controlling axis motion (Control
Mode = No Control), the state diagram reduces to the following for a Feedback
Only axis or CIP Motion Encoder device type. Shaded regions show mapping of
Axis States to corresponding Identity Object states. State transitions terminating
on shaded boxes can transition to any axis state within the box.
Feedback Only Axis Behavior
Model

 Loading...
Loading...











