Behavior models used in CIP Motion
Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018 79
Cogging Compensation
For PM motors, one of the more troublesome Kt variations to contend with is a
position dependent variation to Kt known as motor cogging. The Kt scaling factor
can be used to compensate for motor cogging by performing a test on the motor
that generates a Kt versus Electrical Angle Cogging Compensation table. This
table can then be used to compensate for the cogging impact in real- time based on
the electrical angle of the motor resulting in smoother motor operation.
See also
Torque Control Behavior on page 71
Velocity Control Behavior on page 79
In Velocity Control mode, there are two operative control methods supported,
Closed Loop Velocity Control and Open Loop Frequency Control.
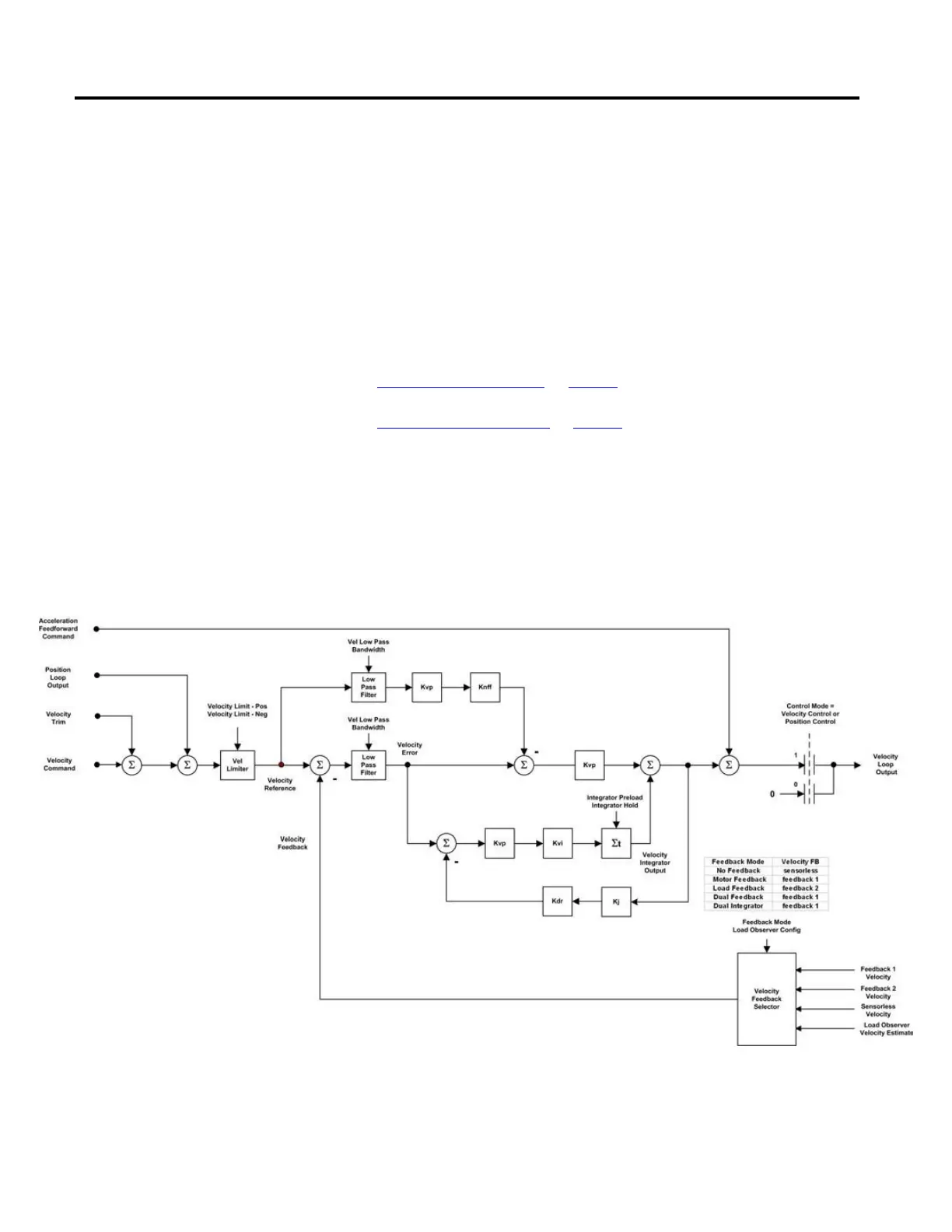
Closed Loop Velocity Control model
Targeted for applications that require tight speed regulation. The following
diagram provides an overview of this method.
Velocity Control Behavior

 Loading...
Loading...











