92 Rockwell Automation Publication 20A-UM001N-EN-P - July 2013
Appendix A Supplemental Drive Information
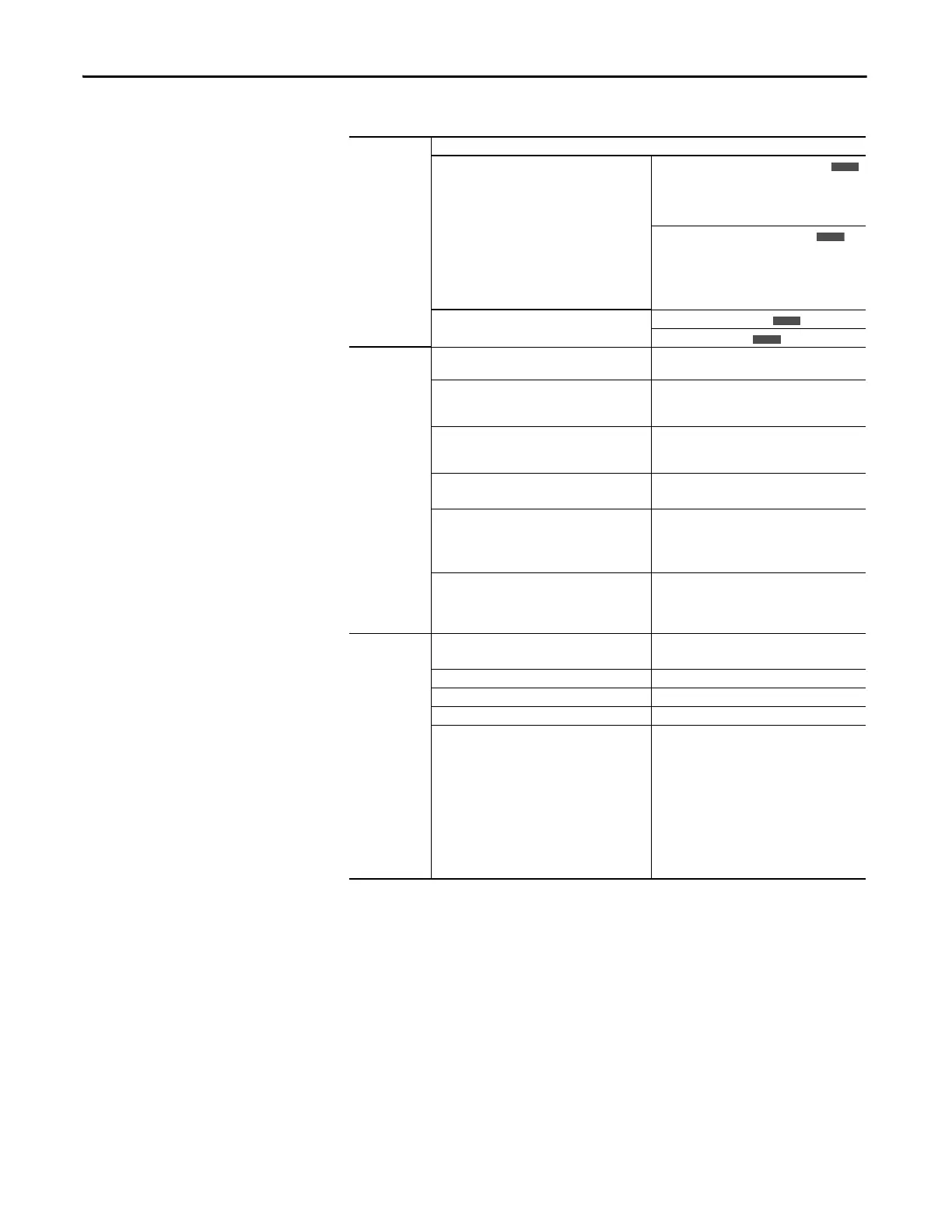
Control
(continued)
Speed control - speed regulation without feedback (Vector Control mode)
0.1% of base speed across 120:1 speed range
120:1 operating range
30 rad/sec bandwidth
with feedback (Vector Control mode)
0.001% of base speed across 120:1 speed
range
1000:1 operating range
125 rad/sec bandwidth
Torque regulation without feedback +/-10%
with feedback +/-5%
Selectable motor control Sensorless Vector with full tuning. Standard V/Hz
with full custom capability and vector control.
Stop modes Multiple programmable stop modes including -
Ramp, Coast, DC-Brake, Fast Brake, Ramp-to-
Hold and S-curve.
Accel/Decel Two independently programmable accel and
decel times. Each time can be programmed from
0…3600 seconds in 0.1 second increments
Intermittent overload 110% Overload capability for up to 1 minute
150% Overload capability for up to 3 seconds
Current limit capability Proactive current limit programmable from
20…160% of rated output current.
Independently programmable proportional and
integral gain.
Motor overload protection Class 10 motor overload protection according to
NEC article 430 and motor over-temperature
protection according to NEC article 430.126
(A)(2). UL 508C File E59272.
Encoder Type Incremental, dual channel
Supply 5V/12V Configurable ±5%
Quadrature 90° ±27°
Duty cycle 50% +10%
Requirements Encoders must be line driver type, quadrature
(dual-channel) or pulse (single-channel),
single-ended or differential and capable of
supplying a minimum of 10 mA per channel.
The encoder interface board accepts 5V or 12V DC
square-wave with a minimum high state voltage
of 3.5V DC (5V mode) and 7.0V DC (12V mode).
Maximum low state voltage is 1V DC (for both 5V
and 12V modes).
Maximum input frequency is 250 kHz.
Table 16 - Specifications (continued)
Category Specification
E C

 Loading...
Loading...








