Rockwell Automation Publication 20A-UM001N-EN-P - July 2013 91
Supplemental Drive Information Appendix A
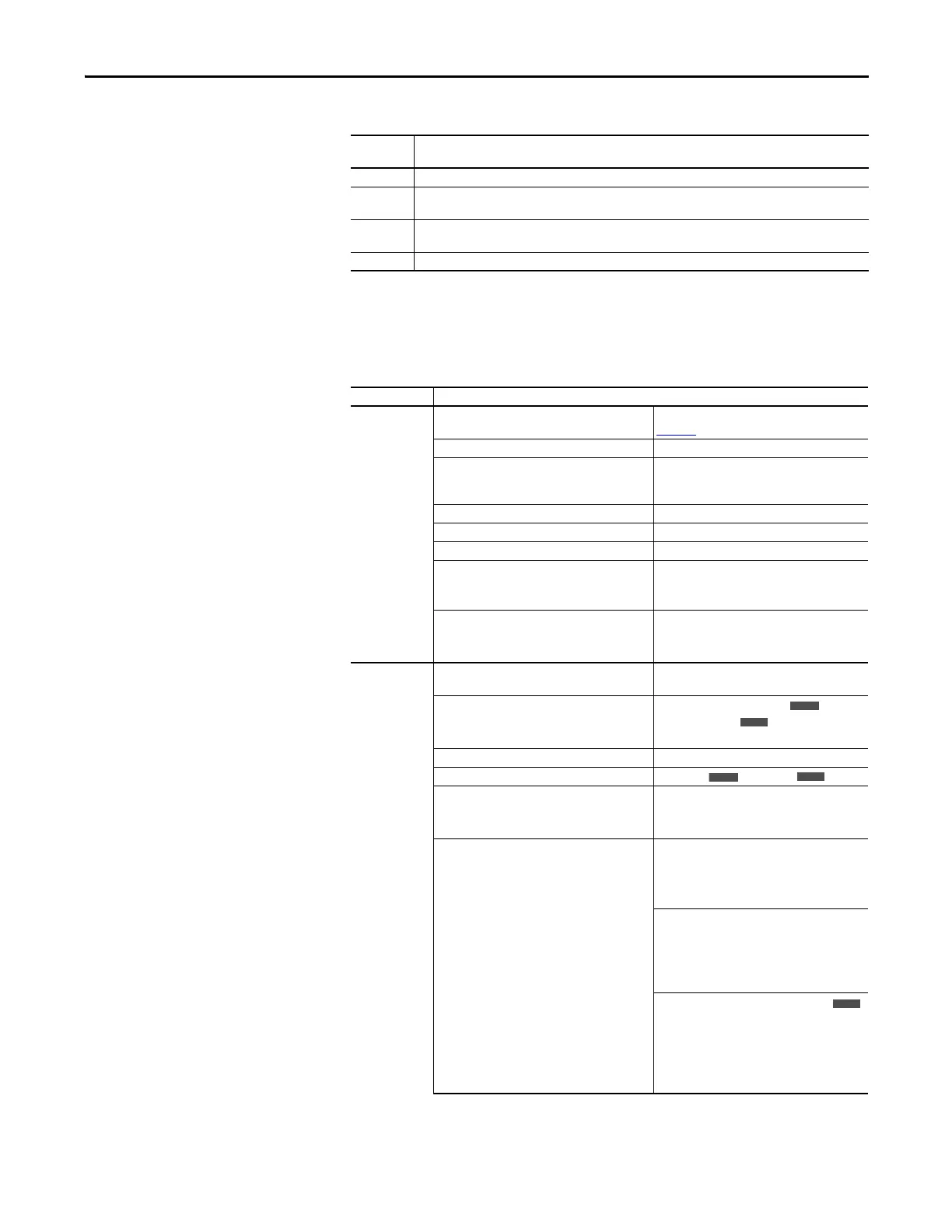
Table 15 - Pollution Degree Ratings According to EN 61800-5-1
Pollution
Degree
Description
1 No pollution or only dry non-conductive pollution occurs. The pollution has no influence.
2 Normally only non-conductive pollution occurs. Occasionally a temporary conductivity, caused by
condensation, is expected when the drive is out of operation.
3 Conductive pollution or dry non-conductive pollution occurs, which becomes conductive due to
condensation, and is expected.
4 The pollution generates persistent conductivity caused, for example, by conductive dust, rain, or snow.
Table 16 - Specifications (continued)
Category Specification
Electrical Voltage tolerance –10% of minimum, +10% of maximum. See
page 121
for Full Power and Operating Range.
Input frequency tolerance 47…63 Hz.
Input phases Three-phase input provides full rating for all
drives. Single-phase operation provides 50% of
rated current.
Displacement power factor (all drives) 0.98 across speed range.
Efficiency 97.5% at rated amps, nominal line volts.
Maximum short circuit rating 200,000 amps symmetrical.
Max short circuit current rating
(by using the recommended fuse or circuit breaker
type)
Maximum short circuit current rating to match
specified fuse/circuit breaker capability.
Drive to motor power ratio
Minimum
Maximum
Recommended not less than 1:2 ratio
Recommended not greater than 2:1 ratio
Control Method Sine coded PWM with programmable carrier
frequency. Ratings apply to all drives.
Carrier frequency 2, 3, 4, 5, 6, 7, 8, 9, and 10 kHz .
2, 4, 8, and 12 kHz .
Drive rating based on 4 kHz.
Output voltage range 0 to rated motor voltage
Output frequency range 0…400 Hz . 0…500 Hz .
Frequency accuracy
Digital input
Analog input
Within ±0.01% of set output frequency.
Within ±0.4% of maximum output frequency.
Frequency control - speed regulation with slip compensation (V/Hz mode)
0.5% of base speed across 40:1 speed range
40:1 operating range
10 rad/sec bandwidth
with slip compensation (Sensorless Vector
mode)
0.5% of base speed across 80:1 speed range
80:1 operating range
20 rad/sec bandwidth
with feedback (Sensorless Vector mode)
0.001% of base speed across 40:1 speed
range
0.1% of base speed across 80:1 speed range
80:1 operating range
20 rad/sec bandwidth
Standard
E C
E C

 Loading...
Loading...








