Rockwell Automation Publication 20A-UM001N-EN-P - July 2013 31
Programming and Parameters Chapter 1
Speed Command File (file C)
File C
Group
No.
Parameter Name and Description
See page 14 for symbol descriptions
Values
Related
SPEED COMMAND (file C)
Spd Mode and Limits
080 [Speed Mode]
Sets the method of speed regulation.
Default:
Options:
0
0
1
2
“Open Loop”
“Open Loop”
“Slip Comp”
“Process PI”
121…
138
125
412
413
[Feedback Select]
Selects the source for motor speed feedback.
Note that all selections are available when you
are using Process PI.
“Open Loop” (0) - no encoder is present, and
slip compensation is not needed.
“Slip Comp” (1) - tight speed control is needed,
and encoder is not present.
“Encoder” (3) - an encoder is present.
“Simulator” (5) - Simulates a motor for testing
drive operation and interface check.
Default:
Options:
0
0
1
2
3
4
5
“Open Loop”
“Open Loop”
“Slip Comp”
“Reserved”
“Encoder”
“Reserved”
“Simulator”
081 [Minimum Speed]
Sets the low limit for speed reference after
scaling is applied.
Refer to parameter 083 [Overspeed Limit].
Default:
Min/Max:
Units:
0.0 Hz
0.0/[Maximum Speed]
0.1 Hz
092
095
082 [Maximum Speed]
Sets the high limit for speed reference after
scaling is applied.
Refer to parameter 083 [Overspeed Limit].
Default:
Min/Max:
Units:
50.0 or 60.0 Hz
(Dependent on voltage class)
5.0/400.0 Hz
5.0/500.0 Hz
0.1 Hz
055
083
091
094
202
298
083 [Overspeed Limit]
Sets the incremental amount of the output
frequency (above [Maximum Speed]) for
functions such as slip compensation.
P82 [Maximum Speed] + P83 [Overspeed
Limit] must be ≤ P55 [Maximum Freq]
Default:
Min/Max:
Units:
10.0 Hz
0.0/20.0 Hz
0.1 Hz
055
082
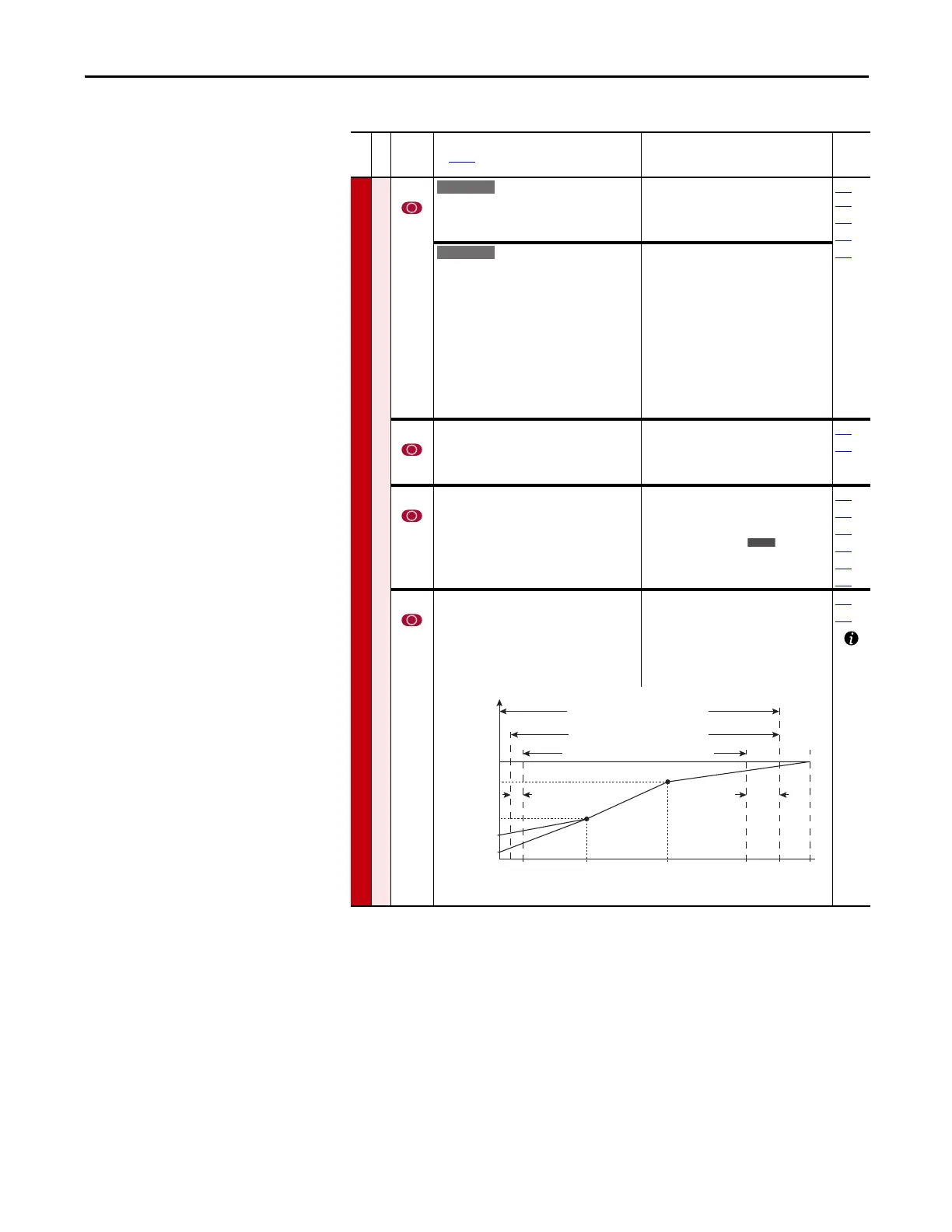
Allowable Output Frequency Range
Bus Regulation or Current Limit
Voltage
Frequency
Allowable Output Frequency Range
Normal Operation
Allowable Reference Frequency Range
Frequency Trim due to
Speed Control Mode
Max Volts
Motor Volts
Break Volts
Start Boost
Run
0 Min
Speed
Motor
Hz
Max
Speed
Output
Freq Limit
Max
Freq
Break
Frequency
Overspeed
Limit

 Loading...
Loading...








