Maintenance 3. Covers
70
LS20-B R ev.4
3.1 Arm Top Cover
CAUTION
■
Do not remove the arm top cover
forcibly. Removing the cover forcibly may result
in damage to the cables, disconnection, and/or contact failure.
Damaged cables,
disconnection, or contact failure is extremely hazardous and may result in electric
shock and/or improper function of the robot system.
When mounting the cover, be careful not to allow the cables to interfere with the
cover mounting and
do not bend these cables forcibly to push them into the cover.
Unnecessary strain on cables may result in damage to the cables, disconnection,
and/or contact failure. Damaged cables, disconnection, or contact failure is
extremely hazardous and may resul
t in electric shock and/or improper function of
routing the cables, observe the cable locations
after removing the cover.
Be sure to
place the cables back to their original locations.
A
rm Top Cover
Removal
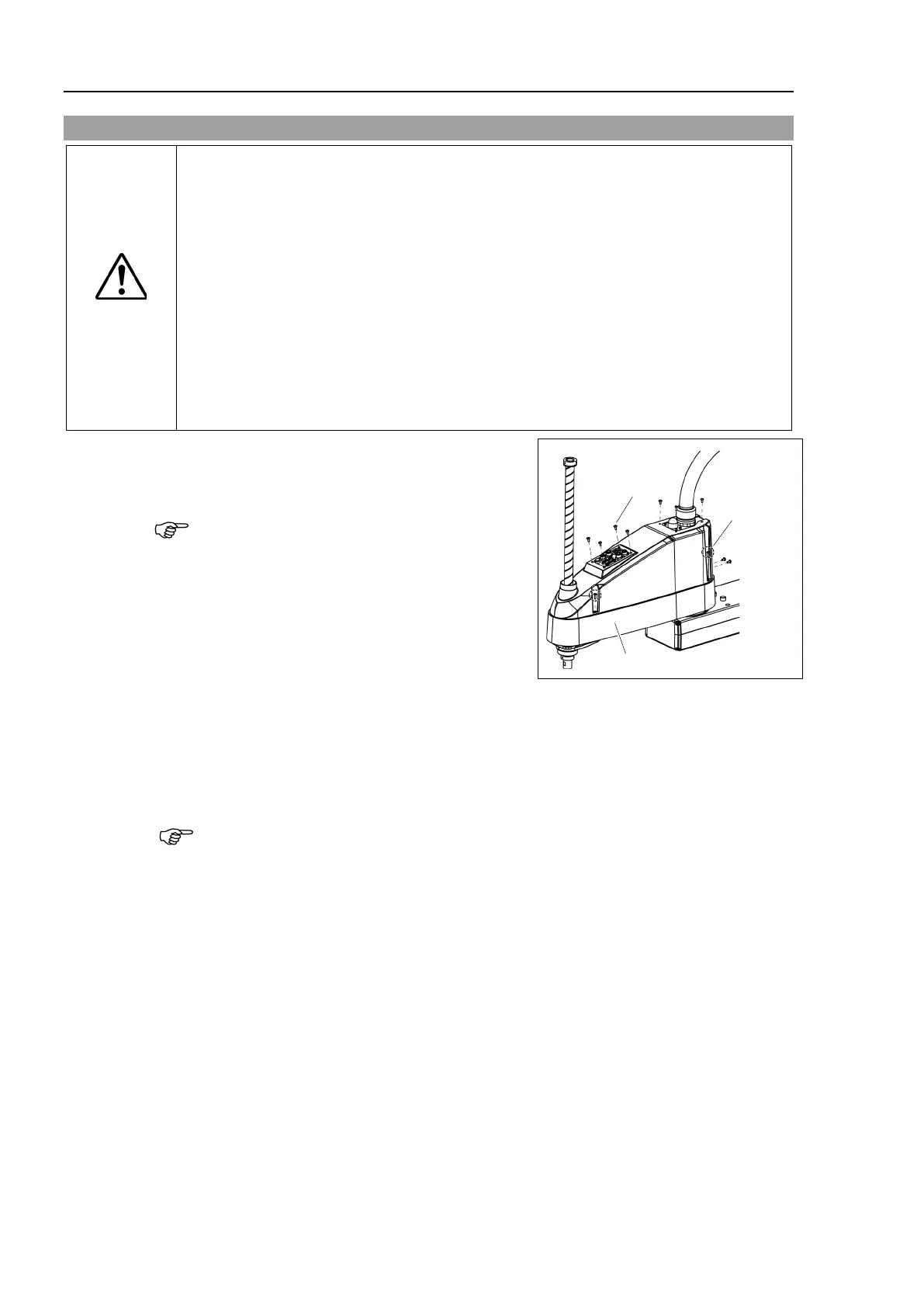
Unscrew the Arm Top Cover mounting bolts, and
then lift the cover.
When bellows are installed to the manipulator,
remove the upper bellows and then remove the
Arm Top Cover. For bellows removal, refer to
Maintenance 9. Bellows
.
wires and tubes when
he cover.
Arm Top Cover
4-M4×14
Double sems
10-M4×10
Truss
Arm Top Cover
Installation
Put the arm top cover to the arm and secure with the Arm Top Cover mounting bolts.
securing the Arm Top Cover, make sure that the lower limit mechanical stop is not
ing the cylindrical part of the Arm Top Cover.
Tightening torque: 0.45 N⋅m
installed to the manipulator, install the Arm Top Cover and then set the
. For bellows installation, refer to Maintenance 9. Bellows.
 Loading...
Loading...







