Maintenance 4. Cable
86
LS20-B R ev.4
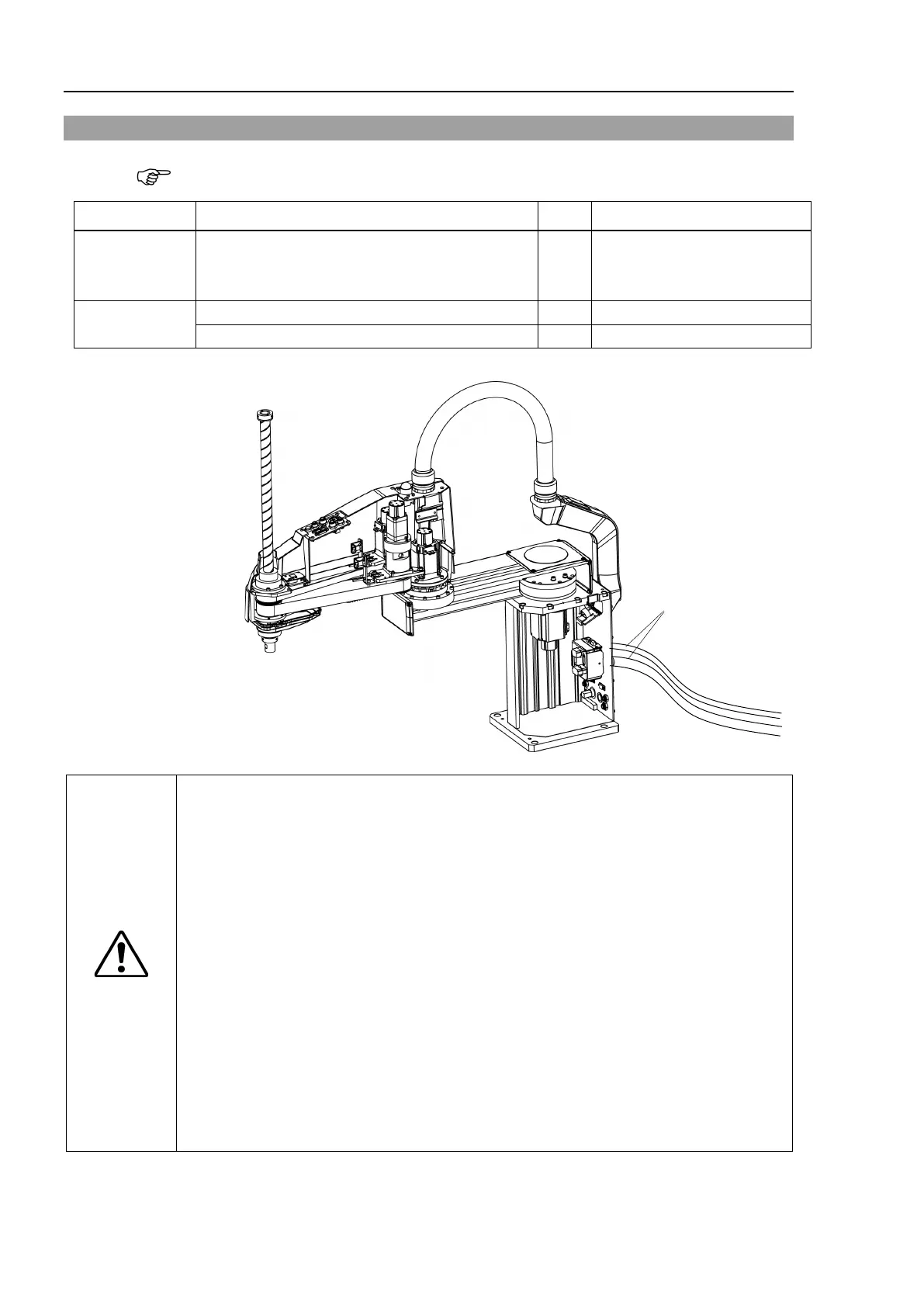
4.3 Replacing M/C Cable
LS20-B series manipulator does not have batteries. Position data is memorized by the
motor. When replacing cables, calibration is not necessary.
Maintenance
part
M/C Cable 1
3 m: 2196934
5 m: 2196935
Tool
C
AUTION
■
If the connectors have been disconnected during the replacement of the cable
unit, b
e sure to reconnect the following connectors to their proper positions
efer to the block diagrams. Improper connection of the connectors may result
function of the robot system.
For details on the connections, refer to
Maintenance: 4.2 Wiring Diagrams.
When installing the cover, be careful not to allow the cables to interfere with the
cover mounting and do
not bend these cables forcibly to push them into the cover.
Unnecessary strain on cables may result in damage to the cables, disconnection,
and/or contact f
ailure. Damaged cables, disconnection, or contact failure is
extremely hazardous and may result in electric shock and/or improper function of
the robot system.
When
routing the cables, observe the cable locations
after removing the cover.
Be sure to
place the cables back to their original locations.
Be sure to connect the cables properly. Do not allow unnecessary strain on the
cables. (Do not
put heavy objects on the cables. Do not bend or pull the cables
y.) The unnecessary strain on the cables may result in damage to the
cables, disconnection, and/or contact failure. Damaged cables, disconnection,
or contact failure is extremely hazardous and may result in electric shock and/or
improper function of the robot system.
 Loading...
Loading...







