Setup & Operation 3. Environments and Installation
LS20-B Rev.4 29
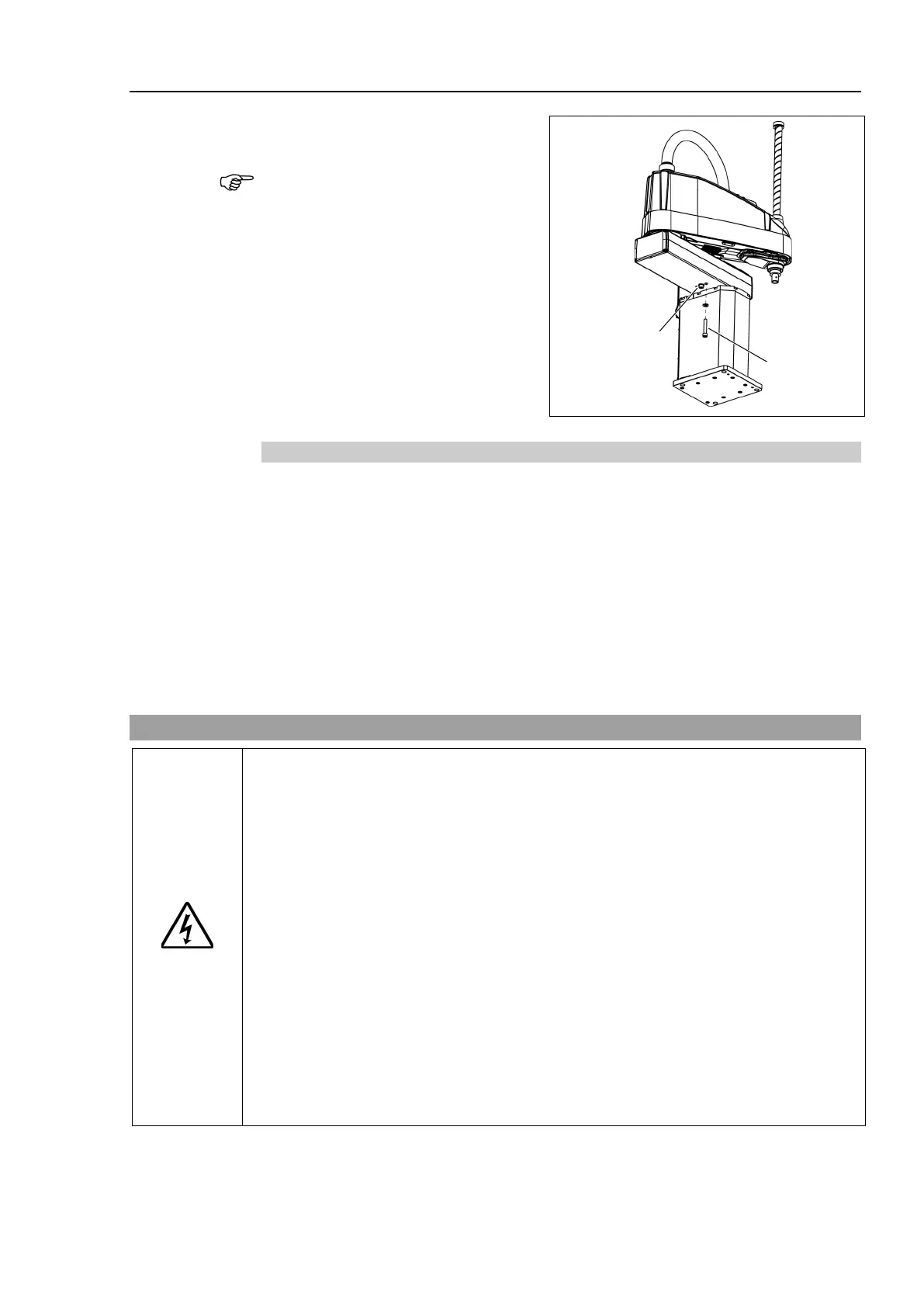
Remove the screw for fixing the arm.
The removed screw will be
necessary
transporting the Manipulator.
the
arm lock which is
supplied
at shipment.
the screw.
Do not remove the mechanical stop.
3.5.2 Cleanroom-Model
(1) Unpack the Manipulator outside of the clean room.
(2) Secure the Manipulator to delivery equipment such as a pallet with bolts so that the
Manipulator does not fall over.
(3) Wipe off the dust on the Manipulator with a little alcohol or distilled water on a lint-
free cloth.
(4) Transport the Manipulator to the cleanroom.
(5) Refer to the installation procedure of each Manipulator model and install the
Manipulator.
(6) Connect an exhaust tube to the exhaust port.
3.6 Connecting the Cables
WARNING
■
To shut off power to the robot system, disconnect the power plug from the power
source. Be sure to connect the AC power cable to a power receptacle.
DO NOT connect it directly to a factory power source.
performing any replacement procedure, turn OFF the Controller and related
and then disconnect the power plug from the power source.
Performing any replacement procedure with the power ON is extremely hazardous
and may result in
electric shock and/or malfunction of the robot system.
Be sure to connect the cables properly.
Do not allow unnecessary strain on the
put heavy objects on the cables. Do not bend or pull the cables
y.) The unnecessary strain on the cables may result in damage to the
ction, and/or contact failure.
Damaged cables, disconnection, or contact failure is extremely hazardous and may
result in electric shock and/or improper function of the r
obot system.
Grounding the manipulator is done by connecting with the controller. Ensure that
the controller is grounded and the cables are correctly connected. If the ground
wire is improperly connected to ground, it may result in the fire or elect
ric shock.
 Loading...
Loading...







