Function Parameter Setting
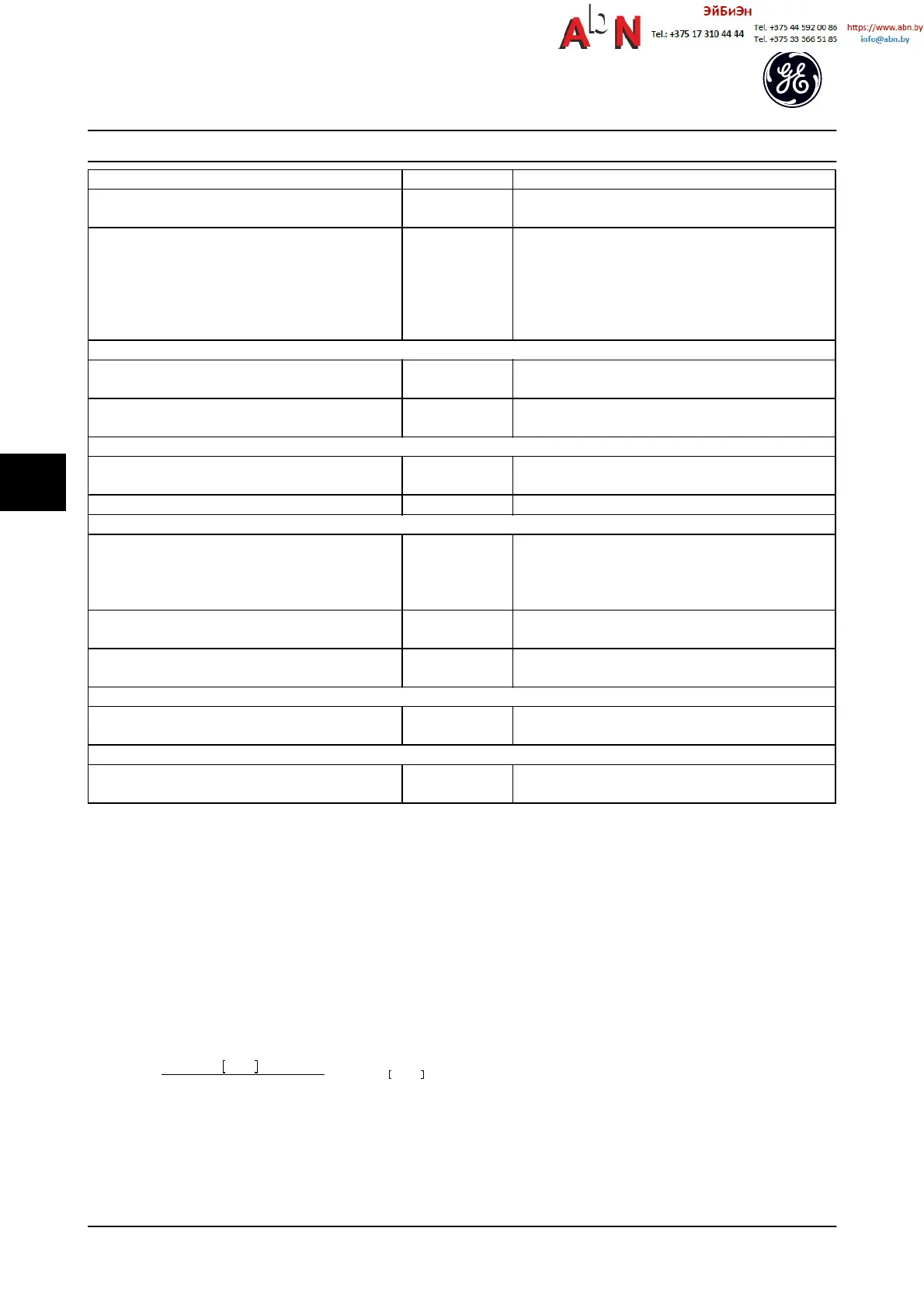
Check that the ramp settings are within drive capabilities
and allowed application operating specifications.
F-07 Accel Time 1
F-08 Decel Time 1
default setting
default setting
Set acceptable limits for the motor speed and frequency. F-18 Motor Speed
Low Limit [RPM]
F-17 Motor Speed
High Limit [RPM]
F-03 Max Output
Frequency 1
0 RPM
1,500 RPM
60 Hz (default 132 Hz)
4) Configure the Speed Control and select the Motor Control principle
Activation of Speed Control H-40 Configuration
Mode
[1] Speed closed-loop
Selection of Motor Control Principle H-41 Motor
Control Principle
[3] Flux w motor feedb
5) Configure and scale the reference to the Speed Control
Set up Analog Input 53 as a reference source F-01 Frequency
Setting 1
Not necessary (default)
Scale Analog Input 53 0 RPM (0 V) to 1,500 RPM (10 V) AN-1# Not necessary (default)
6) Configure the 24 V HTL encoder signal as feedback for the Motor Control and the Speed Control
Set up digital input 32 and 33 as encoder inputs E-05 Terminal 32
Digital Input
E-06 Terminal 33
Digital Input
[0] No operation (default)
Choose terminal 32/33 as motor feedback H-42 Flux Motor
Feedback Source
Not necessary (default)
Choose terminal 32/33 as Speed PID feedback PI-00 Speed PID
Feedback Source
Not necessary (default)
7) Tune the Speed Control PID parameters
Use the tuning guidelines when relevant or tune
manually
PI-0# See the guidelines below
8) Finished!
Save the parameter setting to the keypad for safe
keeping
K-50 Keypad Copy [1] All to keypad
Table 6.17
6.5.1.1 Tuning PID speed control
The following tuning guidelines are relevant when using
one of the Flux motor control principles in applications
where the load is mainly inertial (with a low amount of
friction).
The value of PI-02 Speed PID Proportional Gain is
dependent on the combined inertia of the motor and load,
and the selected bandwidth can be calculated using the
following formula:
Par
.
PI
− 02 =
Total
inertia
kgm
2
x
par
.
P
− 06
Par
.
P
− 07
x
9550
x
Bandwidth
rad
/
s
NOTE!
P-07 Motor Power [kW] is the motor power in [kW] (i.e.
enter ‘4’ kW instead of ‘4,000’ W in the formula).
Generally, the practical maximum limit of PI-02 Speed PID
Proportional Gain is determined by the encoder resolution
and the feedback filter time, but other factors in the
application might limit the PI-02 Speed PID Proportional
Gain to a lower value.
To minimize the overshoot, PI-03 Speed PID Integral Time
could be set to approx. 2.5 s (varies with the application).
PI-04 Speed PID Differentiation Time should be set to 0 until
everything else is tuned. If necessary, finish the tuning by
experimenting with small increments of this setting.
Application Setup Examples
AF-650 GP
TM
Design and Installation Guide
6-16 DET-767A
6

 Loading...
Loading...









