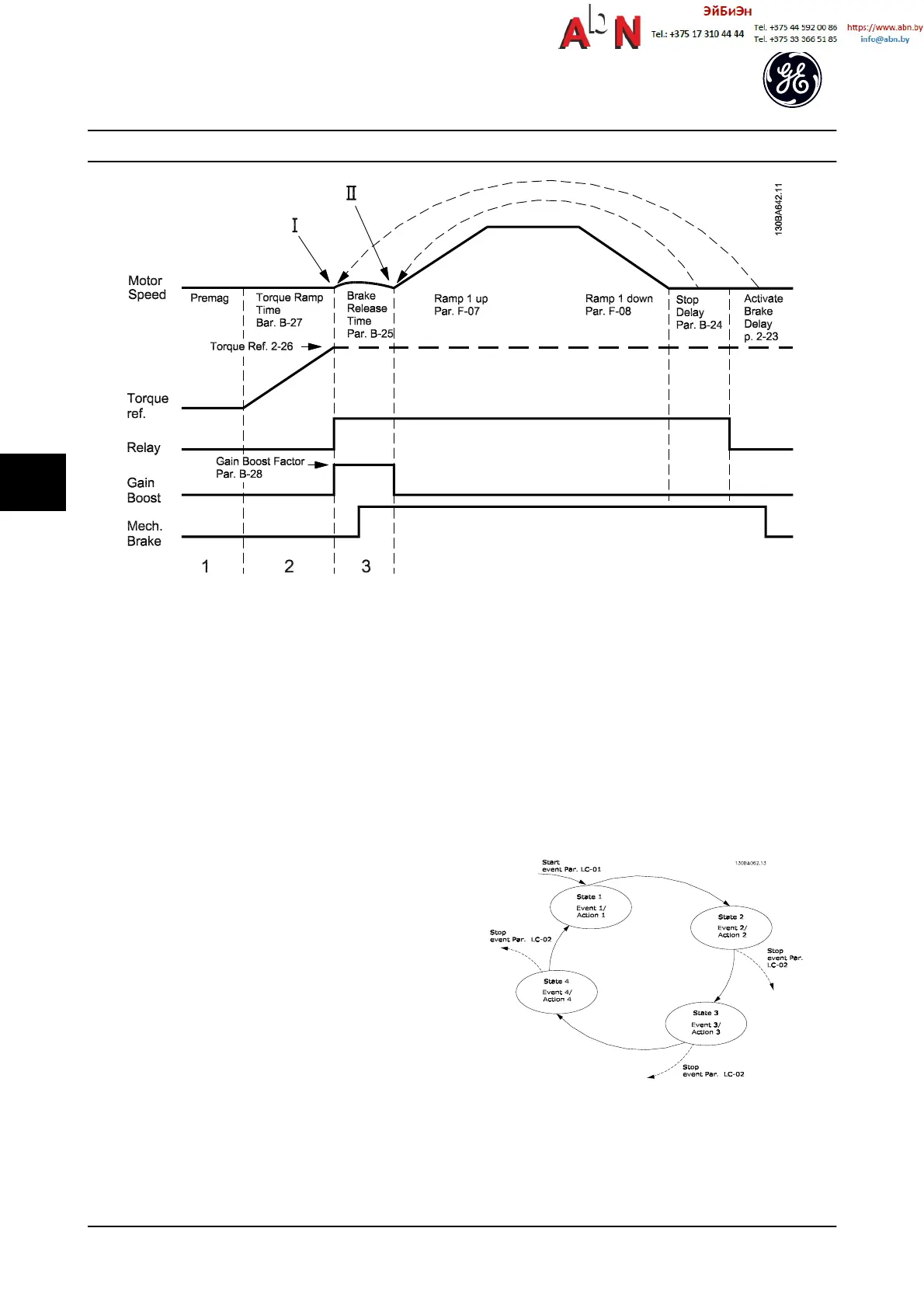
Figure 6.24 Brake release sequence for hoist mechanical brake control
I) Activate brake delay: The adjustable frequency drive starts again from the mechanical brake engaged position.
II) Stop delay: When the time between successive starts is shorter than the setting in B-24 Stop Delay, the adjustable frequency drive starts
without applying the mechanical brake (e.g. reversing).
NOTE!
For an example of advanced mechanical brake control for
hoisting applications, see section Application Examples
6.7 Logic Controller
Logic Controller (LC) is essentially a sequence of user-
defined actions (see LC-52 Logic Controller Action [x])
executed by the LC when the associated user-defined
event (see LC-51 Logic Controller Event [x]) is evaluated as
TRUE by the LC.
The condition for an event can be a particular status or
that the output from a logic rule or a comparator operand
becomes TRUE. That will lead to an associated action as
illustrated.
Events and actions are each numbered and linked together
in pairs (states). This means that when event [0] is fulfilled
(attains the value TRUE), action [0] is executed. After this,
the conditions of event [1] will be evaluated and if
evaluated TRUE, action [1] will be executed and so on.
Only one event will be evaluated at any time. If an event is
evaluated as FALSE, nothing happens (in the LC) during
the current scan interval and no other events will be
evaluated. This means that when the LC starts, it evaluates
event [0] (and only event [0]) each scan interval. Only when
event [0] is evaluated TRUE, will the LC execute action [0]
and start evaluating event [1]. It is possible to program
from 1 to 20 events and actions.
When the last event/action has been executed, the
sequence starts over again from event [0]/action [0]. The
figure shows an example with three event/actions:
Figure 6.25
Application Setup Examples
AF-650 GP
TM
Design and Installation Guide
6-26 DET-767A
6

 Loading...
Loading...









