6.5.2.1 Example of Process PID Control
The following is an example of process PID control used in
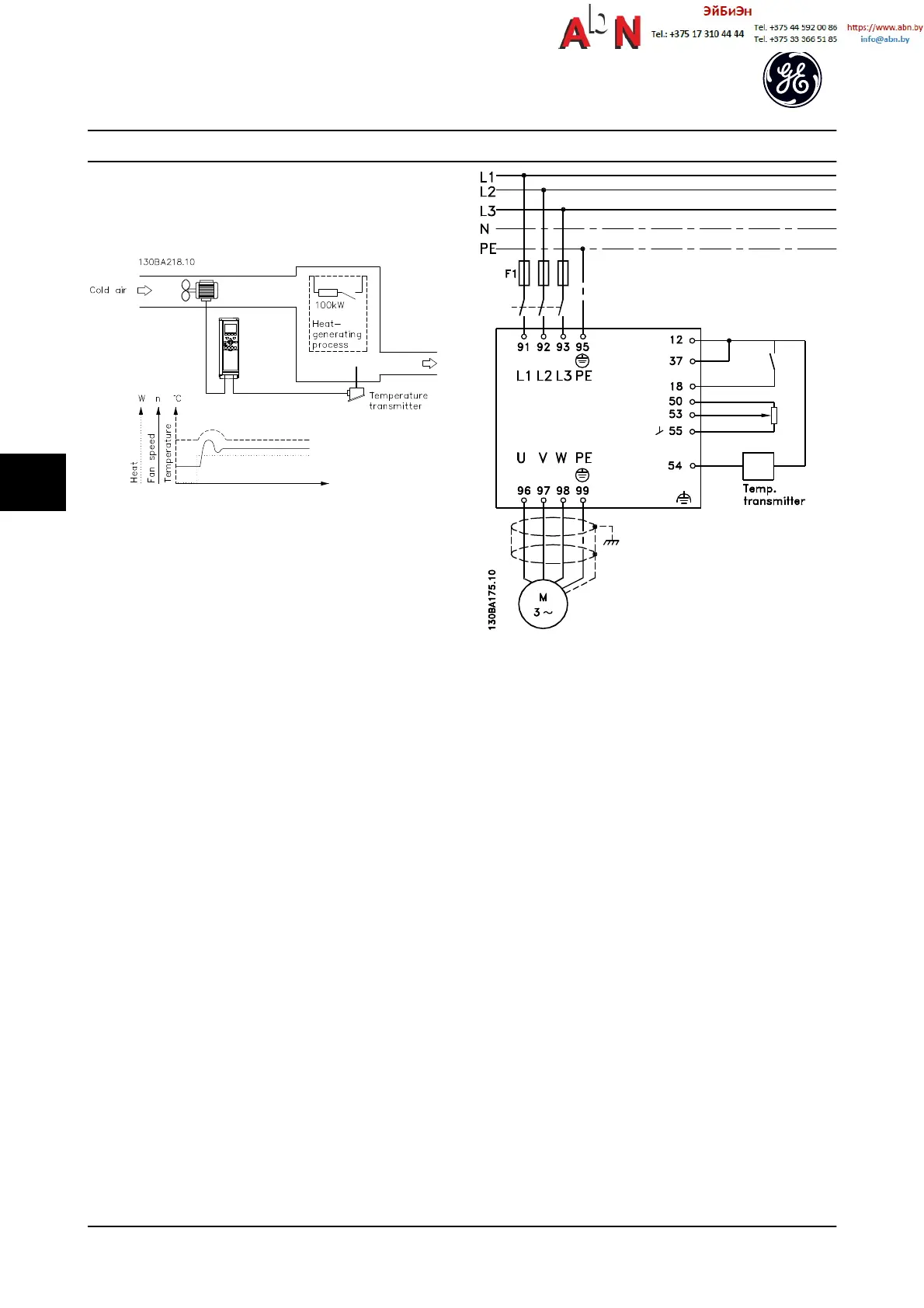
a ventilation system:
Figure 6.19
In a ventilation system, the temperature is to be settable
from 23°–95° F [-5°–35°C] with a potentiometer of 0–10 V.
The set temperature must be kept constant, for which
purpose the Process Control is to be used.
The control is of the inverse type, which means that when
the temperature increases, the ventilation speed is
increased as well, so as to generate more air. When the
temperature drops, the speed is reduced. The transmitter
used is a temperature sensor with a working range of 14°–
104° F [-10°–+40°C], 4-20 mA. Min./Max. speed 300/1,500
RPM.
Figure 6.20 Two-wire Transmitter
1. Start/Stop via switch connected to terminal 18.
2. Temperature reference via potentiometer (23°–95°
F [-5°–35°C], 0–10 V DC) connected to terminal
53.
3. Temperature feedback via transmitter (14°–104° F
[-10°–+40°°C], 4–20 mA) connected to terminal
54. Switch S202 set to ON (current input).
6.5.2.2 Ziegler Nichols Tuning Method
NOTE!
The method described must not be used on applications
that could be damaged by the oscillations created by
marginally stable control settings.
The criteria for adjusting the parameters are based on
evaluating the system at the limit of stability rather than
on taking a step response. We increase the proportional
gain until we observe continuous oscillations (as measured
on the feedback), that is, until the system becomes
marginally stable. The corresponding gain (K
u
) is called the
ultimate gain. The period of the oscillation (P
u
) (called the
ultimate period) is determined as shown in the figure.
Application Setup Examples
AF-650 GP
TM
Design and Installation Guide
6-18 DET-767A
6

 Loading...
Loading...









