ADV200 • Functions description and parameters list 131
22.13-FUNCTIONS/BRAKECONTROL
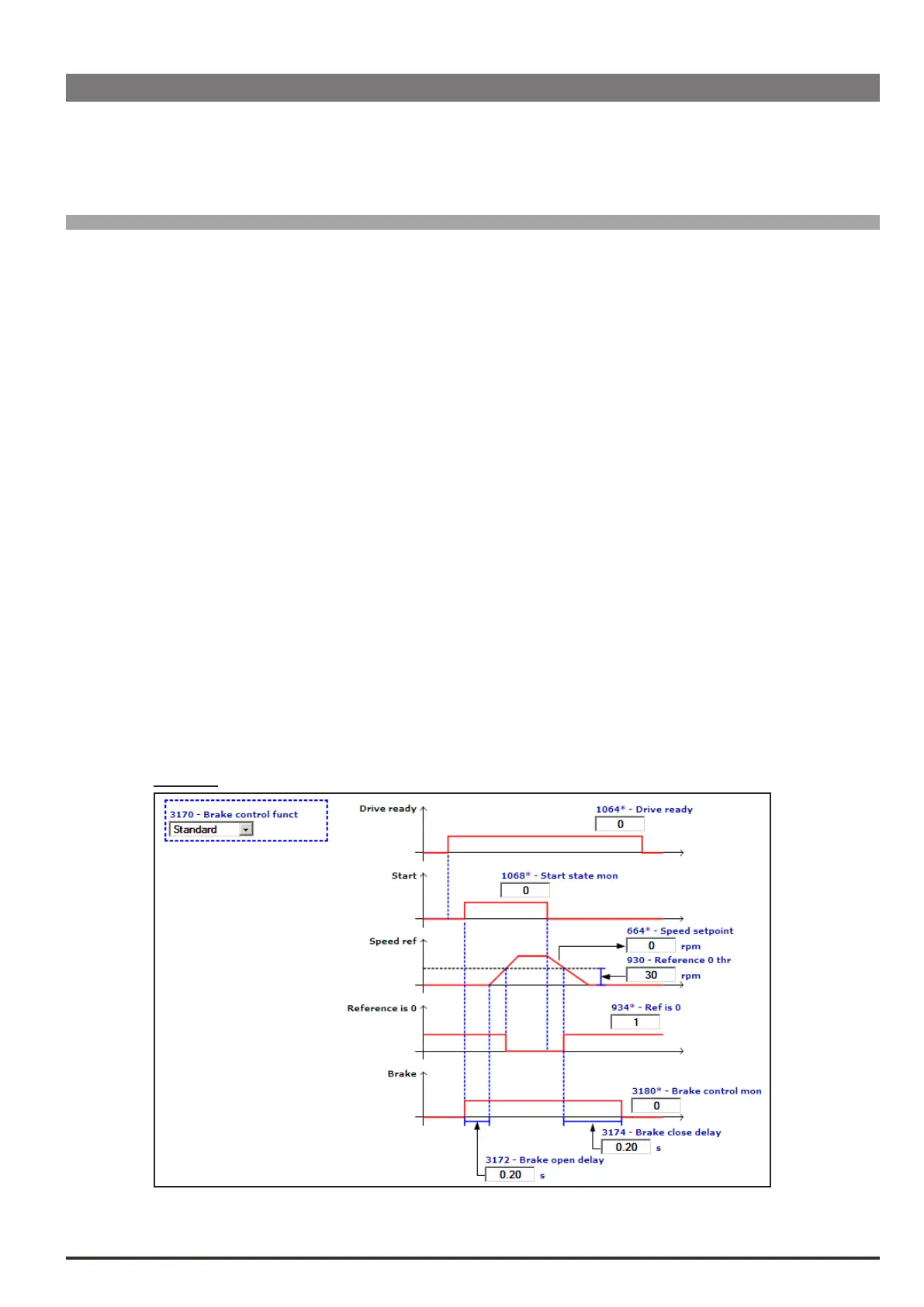
This function is used to control the motor parking brake.
Do not use the Brakecontroland the SpeedCapture functions together, as the latter, if enabled before the Start
command, attempts to execute synchronisation with the motor speed and with the brake closed.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.13.1 3170Brakecontrolfunct ENUM Disable 0 3 ERWZ FVS
This parameter is used to enable the Brakecontrolfunct.
0 Disable
1 Standard
2 Hoist mode 1
3 Hoist mode 2
If set to 0 the function is disabled:
If set to 1 the function is enabled.
Set to 2 to enable the Hoist mode 1 function for hoisting applications using the standard drive.
Set to 3 to enable the Hoist mode 2 function for hoisting applications using the drive with the special “Position-
er” application.
In “Hoistmode1” all the parameters between PAR 3170 and PAR 3186 are used, whereas in “Hoistmode
2” PAR 3188 and 3190 are also used, but parameter 3182 is ineffective (since it is the “torque” value that is
considered, not the “current”).
If the drive is in “V/f” control mode, the only possible selection is “Standard” and “Hoistmode1”.
If “Hoistmode2” is enabled and the drive is thus in “FluxvectorCL” or “FluxvectorOL” mode, when switch-
ing to “V/fcontrol” the brake control mode (PAR 3170) is automatically set to “Disable”.
The following can be selected, depending on the control mode used:
1) V/fcontrol -> “Standard” ; “Hoist mode 1” (for asynchronous motors)
2) FluxvectorCL -> “Standard” ; “Hoist mode 1” ; “Hoist mode 2”
3) FluxvectorOL -> “Standard” ; “Hoist mode 1” ; “Hoist mode 1”
Standard
 Loading...
Loading...











