ADV200 • Functions description and parameters list 29
6–RAMPS
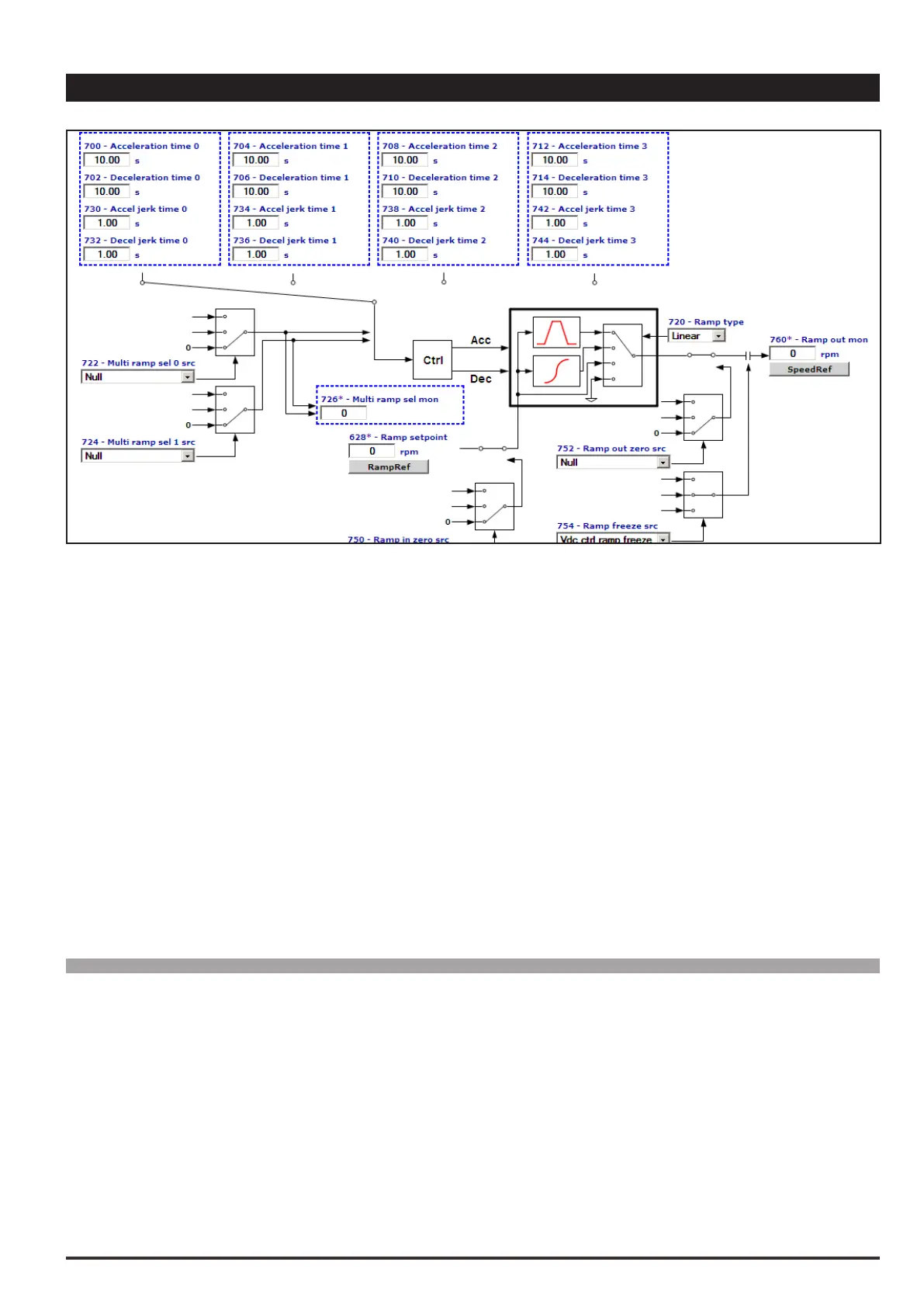
The ramp (reference integrator) determines the acceleration and deceleration times of the drive. Times can be set
independently.
The ramp times of Fast stop command are set on Accelerationtime3 and Decelerationtime3. The command can
be enabled from the terminal strip..
The ramp can be linear or S-shaped, as preferred.
The references can be set in different ways:
- with the Ramp ref 1 and / or Ramp ref 2 references
- with the Multi speed function
- with the Motor potentiometer function
- with the Jog function
The ramp generator can be used in the “stand alone” mode. When disabled (Ramptype=Off), the “Enable drive,
Start/Stop and Fast stop” commands do not affect the ramp generator. In this condition the ramp generator can be
used separately.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
6.1 700 Accelerationtime0 s FLOAT 10.00 0.01 1000.00 RW FVS
6.2 702 Decelerationtime0 s FLOAT 10.00 0.01 1000.00 RW FVS
6.3 704 Accelerationtime1 s FLOAT 10.00 0.01 1000.00 ERW FVS
6.4 706 Decelerationtime1 s FLOAT 10.00 0.01 1000.00 ERW FVS
6.5 708 Accelerationtime2 s FLOAT 10.00 0.01 1000.00 ERW FVS
6.6 710 Decelerationtime2 s FLOAT 10.00 0.01 1000.00 ERW FVS
6.7 712 Accelerationtime3 s FLOAT 10.00 0.01 1000.00 ERW FVS
6.8 714 Decelerationtime3 s FLOAT 10.00 0.01 1000.00 ERW FVS
The acceleration and deceleration ramp times are used to avoid sudden changes in the drive output frequency,
which could cause mechanical shocks, excessive current on the motor and excessive DC-bus voltage values.
The acceleration times (6.1,6.3,6.5,6.7) are expressed as the time necessary to bring the frequency from
 Loading...
Loading...











