3. Parameter setting
3-25
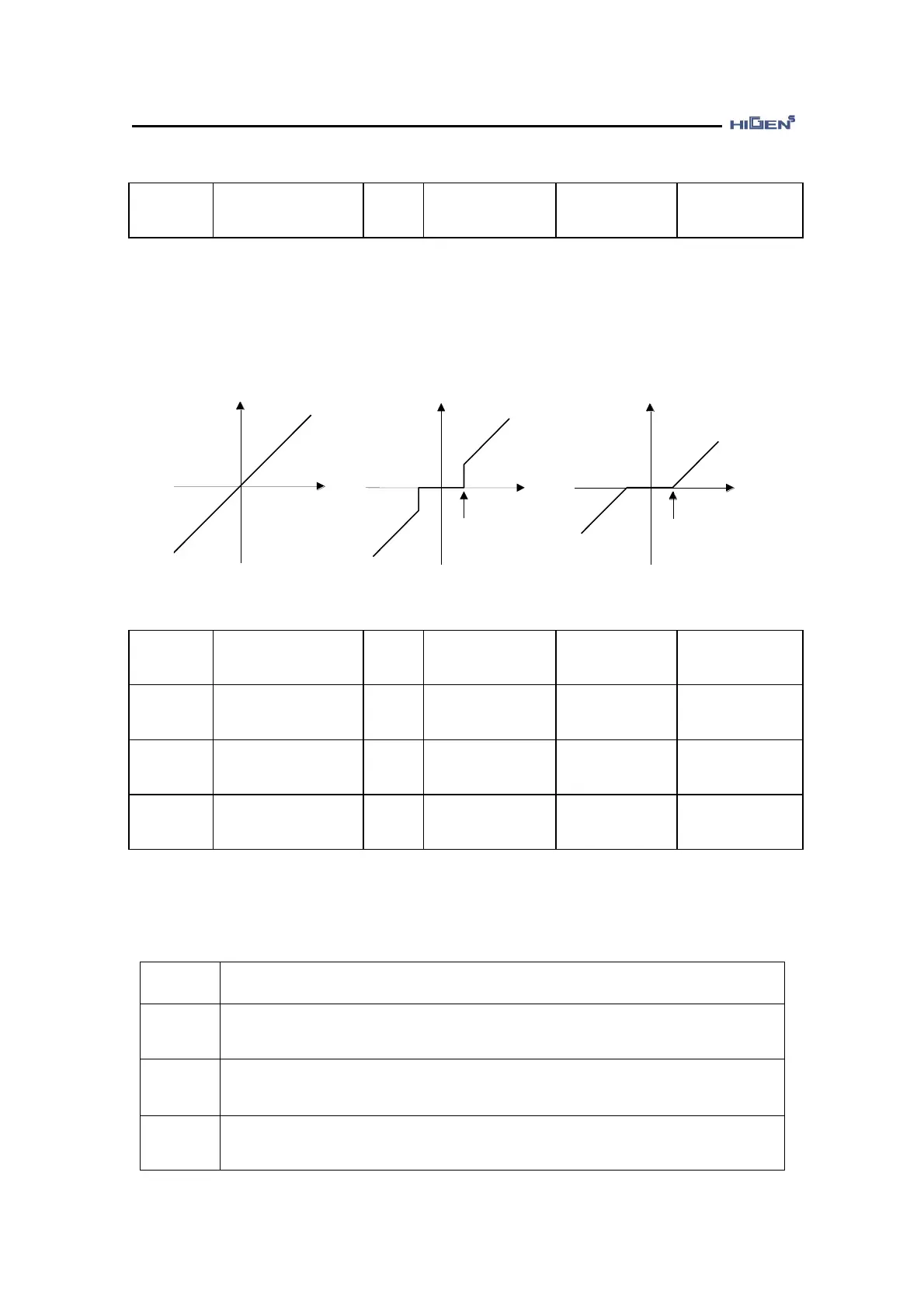
Clamp mode is only applied in the speed control mode. Clamp mode can be used when
stopping the servo motor without dropping the analog command voltage to 0[V]. Once it is
clamped, it will return to its clamped location even when it turns by external force.
Command
voltage
Speed
command
Speed
command
Command
voltage
Clamp voltage
Speed
command
Command
voltage
Clamp voltage
Clamp mode:0 Clamp mode:1 Clamp mode:2
Setting range
-1000.0 ~ 1000.0
Setting range
0.0 ~ 2000.0
Setting range
0.0 ~ 1000.0
When torque command operation mode is set to “2”, the feedforward TRQ can be used. The
feedforward TRQ input enables fast decision making during speed control. But if the feed forward
input is too high, it can cause an overshoot or undershoot. Apply appropriately.
The function by analog torque command is operated by input contact point
(SPDLIM/TLIM).
The analog torque command continually operates in torque limit value irrelevant
from the contact point input.
The analog torque command operates as feedforward torque item. (Precision
control)
 Loading...
Loading...