3. Parameter setting
3-20
Speed/Torque/
Position control
Select whether to output alarm or automatic reset when the power returns to normal
when the power fail alarm occurs due to an error in the main circuit power (R, S, T
terminals).
* If you set P02-37 = 1, you can check the alarm status by reading the current alarm
number through serial communication.
Speed/Torque/
Position control
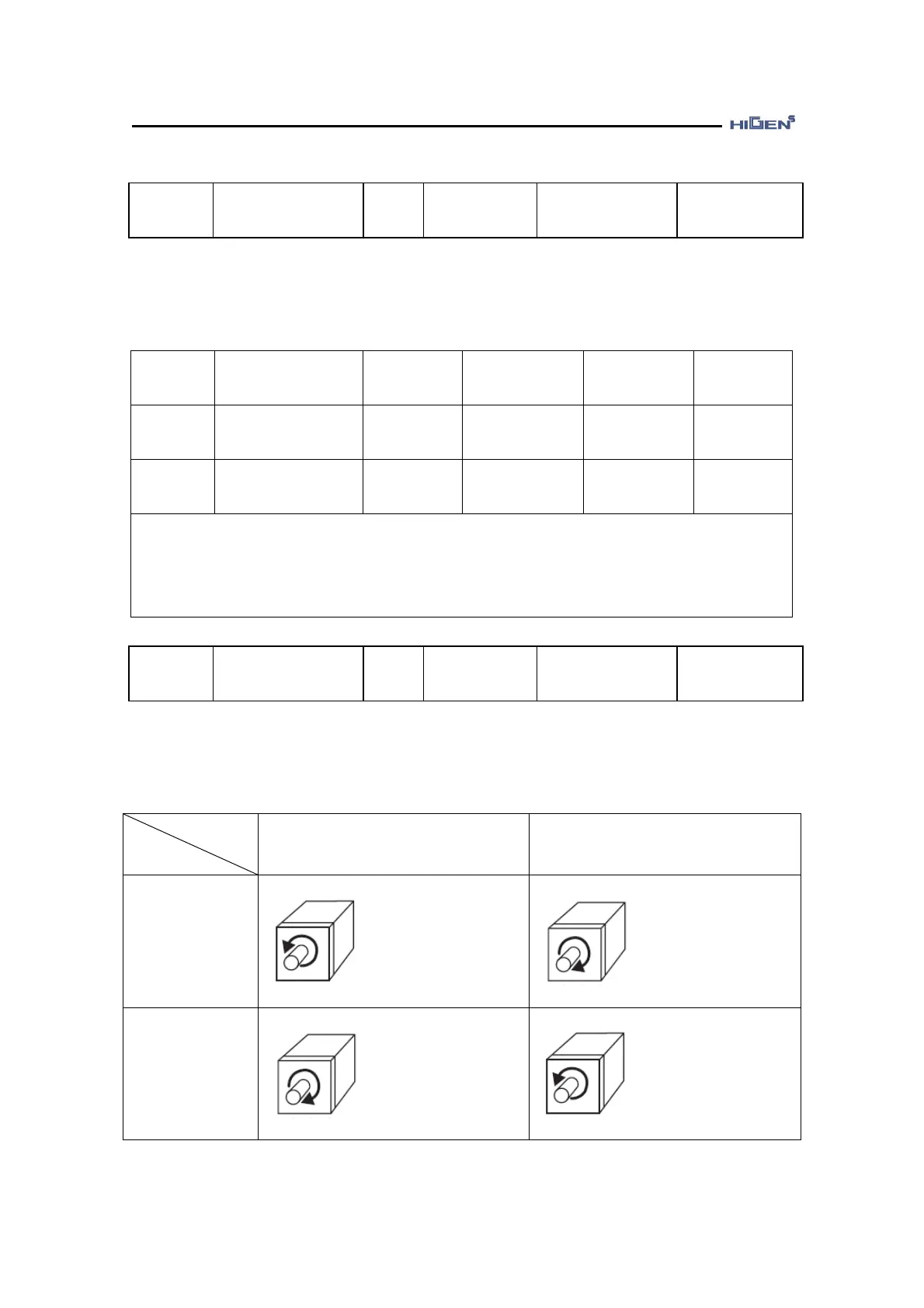
In case of using 17bit serial encoder, the direction of motor rotation and encoder division
output can be reversed.
* When using reverse mode, direction selection parameter (P02-27) is ignored.
CCW Rotation
B phase lead division
output
CW Rotation
A phase lead
division output
CW Rotation
B phase lead division
output
CCW Rotation
A phase lead
division output
 Loading...
Loading...