2 — INSTALLATION AND WIRING
Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022 Return to TOC
pg. 28
e supported protocol is CANopen Physical layer ISO 11898, including the 11-bit and 29-bit
identier protocols. For applications with multiple third party devices, refer to the CANopen Physical
Layer for the recommended bit timing settings and bus lengths based upon baud rate.
Use Port 1 (CAN1) for the communication channel with the Curtis Integrated Toolkit
TM
(CIT) program
and the 1313 HHP programmer. See Appendix D for the CAN port hardware conguration to utilize
these programming tools. is applies to both non-isolated and isolated CAN controller models.
ere are 30 CAN receive mailboxes and 20 CAN transmit mailboxes. ese are shared between
both CAN ports. Attempting to assign more than this using the Assign_CAN_Mailbox() function
will return an error. See the System Information le.
ere are four TPDO and four RPDO mailboxes, each for CAN Port 1 and Port 2. See the CAN
Interface and CAN Interface 2 menus in Programmer.
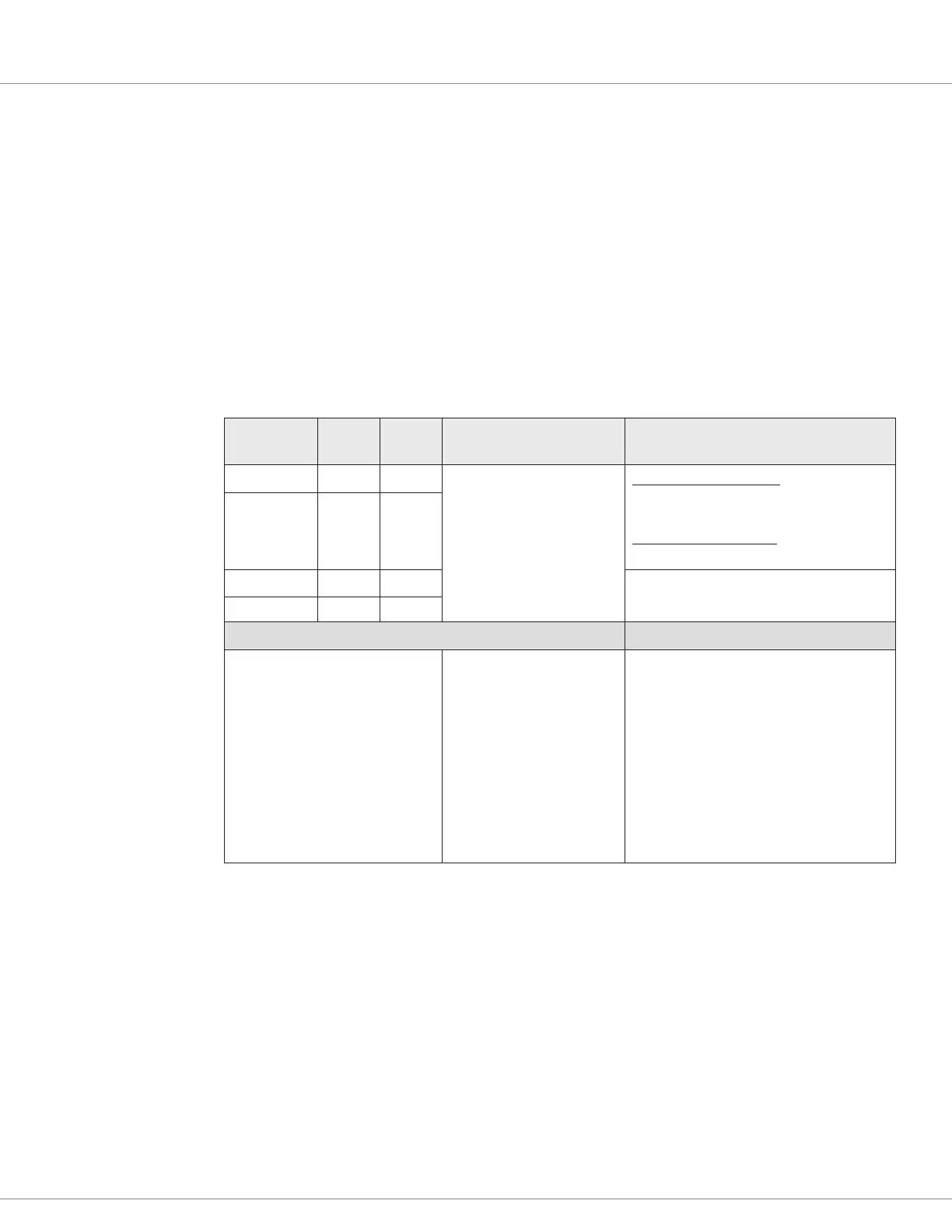
Table 14 CAN Ports Electrical Specifications
CAN Port 23-Pin 35-Pin
Baud Rate
(bps)
CAN Termination
CAN1 High 13 23 –1 = 100k
0 = 125k
1 = 250K
2 = 500K
3 = 800K
4 = 1M
Non-isolated 35 pin units:
Short pins 21 and 34 with external jumper
engage 120 Ohm termination.
Isolated and 23 pin units:
120 ohm termination is a hardware option.
CAN1 Low 20 35
CAN2 High n/a 21 Non-isolated & isolated CAN:
No internal termination.
CAN2 Low n/a 34
VCL Functions VCL Monitor Variables
Assign_CAN_Mailbox ( )
Setup_CAN_Transmit_Mailbox ( )
Setup_CAN_Transmit_Data ( )
Get_Transmit_Counter ( )
Get_Transmit_Status ( )
Clear_Transmit_Status ( )
Enable_Transmit_Mailbox ( )
Disable_Transmit_Mailbox ( )
Get_Fault_CAN_Id ( )
Send_Mailbox ( )
Setup_CAN_Receive_
Mailbox ( )
Setup_CAN_Receive_Data ( )
Get_Received_Counter ( )
Get_Received_Status ( )
Clear_Received_Status ( )
Enable_Receive_Mailbox ( )
Disable_Receive_Mailbox ( )
Get_Receive_Timeout ( )
Clear_Receive_Timeout ( )
Get_Receive_ID ( )
CAN_NMT_State
Motor Position Sensor Inputs
e controllers running cdev 4.0.0.0 (FOS 4.0 or later) operate AC induction (ACIM) and AC
Permanent Magnet Motor (PMAC) motors. To accomplish this, the rotor position inputs accept
various types of sensors.
• 2-channel Quadrature encoders.
• Open Collector (OC) encoders.
• Sine/Cosine Position sensors (encoder).
• Hall switch devices.
When congured as a digital Quadrature Encoder, the input is a 2kΩ pull-up resistor to +5V.
When congured as a Sine/Cosine Analog Encoder, the inputs are setup as analog inputs. ese
sinusoidal analog signals are mathematically converted to rotor position.

 Loading...
Loading...




