2 — INSTALLATION AND WIRING
Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022 Return to TOC
pg. 30
Use a Sin/Cos sensor in PMAC applications.
A Sine/Cosine encoder is an absolute position sensor that produces two sinusoidal signals, set 90° out
of phase. Measurement and comparison of the two signals at any point can determine the absolute
position of the sensor. One 360-degree sin/cos sensor rotation per motor pole pair or 360-degree
electrical rotation is also acceptable if the Enable Multiturn Sensor parameter (0x306D) is enabled.
Matching sensor frequency to motor electrical frequency is strongly recommended.
e physical waveforms are not bipolar, but center around an oset voltage (Vo), typically around 2.5V.
e Peak-Peak voltage (Vpp) swing may be as small as 0.625 volts or up to 4 volts (sensors with less than
2Vpp are not recommended). e larger the Vpp range the better the motor control performance. Both
parameters require conguration for the sensor to operate properly.
e sin min, sin max, cos min and cos max parameters are congured during commissioning. ese
are used to normalize the incoming sin/cos signals.
Sine/Cosine Signal tracking
e values of the inputs are tracked to ensure an accurate position can be obtained if the signal
amplitude changes during operation. e amplitude of the signal may alter due to mechanical
tolerances, thermal expansion, magnetic eld strength changes in the actuator magnet etc.
ese signal tolerances must be maintained throughout the application’s operating conditions,
including voltage, temperature, speed and torque ranges.
e Sin/Cos sensor device must be set up with one waveform cycle per motor electrical cycle or
one waveform cycle per mechanical revolution. For a one waveform per electrical cycle sensor,
the Feedback_Multiturn parameter (0x306D) must be set to 1. One waveform cycle per electrical
cycle is strongly recommended.
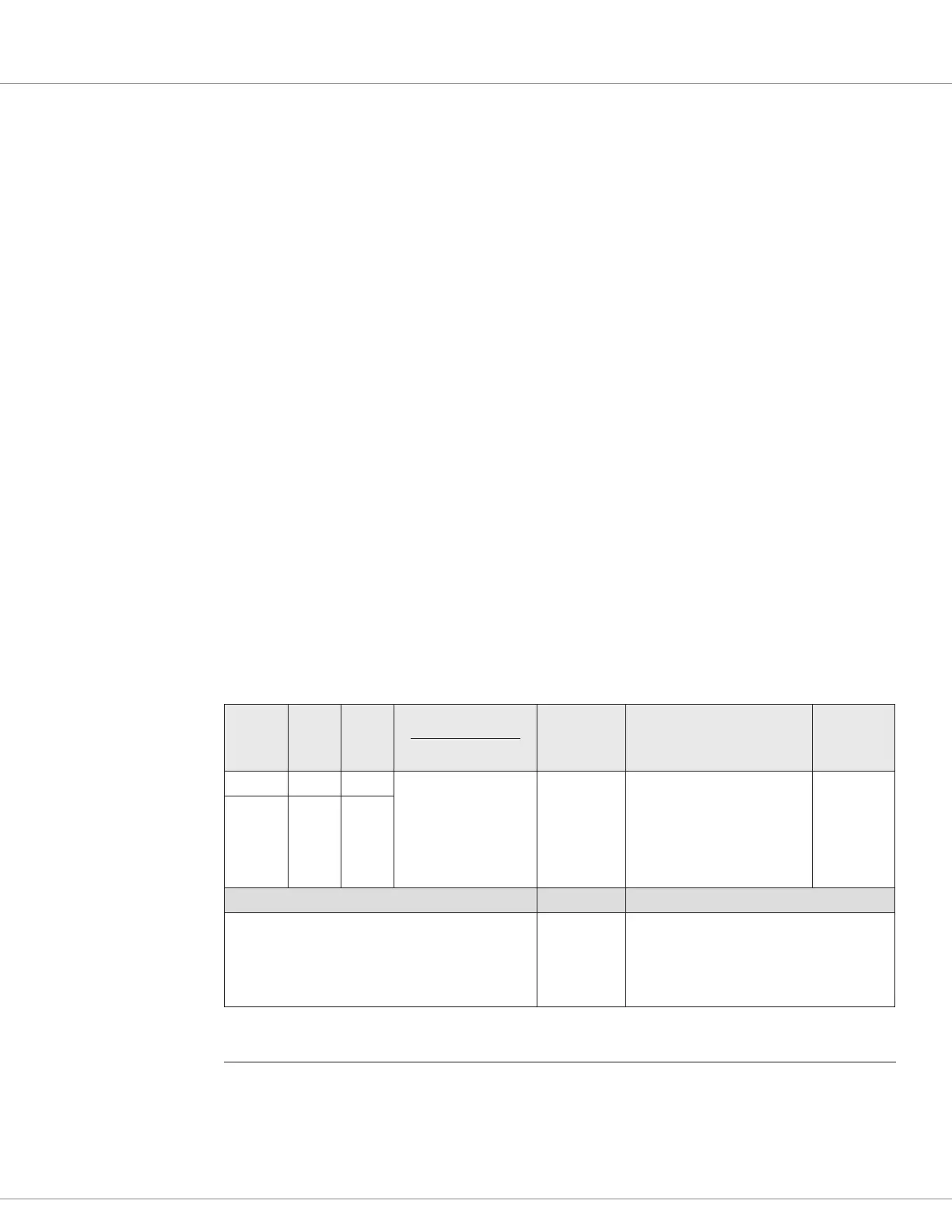
Table 16 Sin/Cos Sensor Device Electrical Specifications
Signal 23-Pin 35-Pin
Operating Voltage
Signal Range
3
Max Input
Frequency
1
Recommended
Propagation Delay
2
Phase Lag
Input
Impedance
Sine 17 31 0.5–4.5V
(+10% / –0%)
Optimum:
Multiturn sensor.
4Vpp with the signal
centered at 2.5V.
599 Hz
Sinewave
≤20° at 599 Hz ±0.5°
Max difference between
Sine/Cosine inputs
> 50k Ω
Cosine 18 32
VCL Functions VCL Monitor Variables
Motor_RPM
AD_Encoder_Sine
AD_Encoder_Cosine
Encoder_Sin_Calibrated
Encoder_Cos_Calibrated
1
Max input frequency may not exceed max controller electrical fundamental frequency.
2
Minimum propagation delay is necessary to maintain rotor alignment at high speed. Larger delays are acceptable for lower
frequency operation. Consult Curtis with application specifics for more information.
3
The maximum voltage difference between the Sin/Cos waveforms at their maximums and minimums is 78mV.
If the voltages are > 78mV during commissioning the Type 84 Motor Characterization fault is triggered.
Furthermore, their minimum voltage must be > 625mV. (i.e., Sin_Max-Sin_Min & Cos_Max-Cos_Min must be > 625 mV).

 Loading...
Loading...




