35
Determining PID Constants (AT, ST, Manual Setup) Section 3-8
3-8 Determining PID Constants (AT, ST, Manual Setup)
3-8-1 AT (Auto-tuning)
• When you execute auto-tuning, the optimum PID constants for the set
point during program execution are automatically set by forcibly changing
the manipulated variable to calculate the characteristics (called the “limit
cycle method”) of the control target.
• To execute AT (auto-tuning), specify “on: AT execute”, and to cancel AT
(auto-tuning), specify “off: AT cancel”.
• AT (auto-tuning) cannot be executed when control has stopped or during
ON/OFF control.
• The result of AT (auto-tuning) is reflected in the “proportional band (P),”
“integral time (I)” and “derivative time (D)” parameters in the “adjustment
level”.
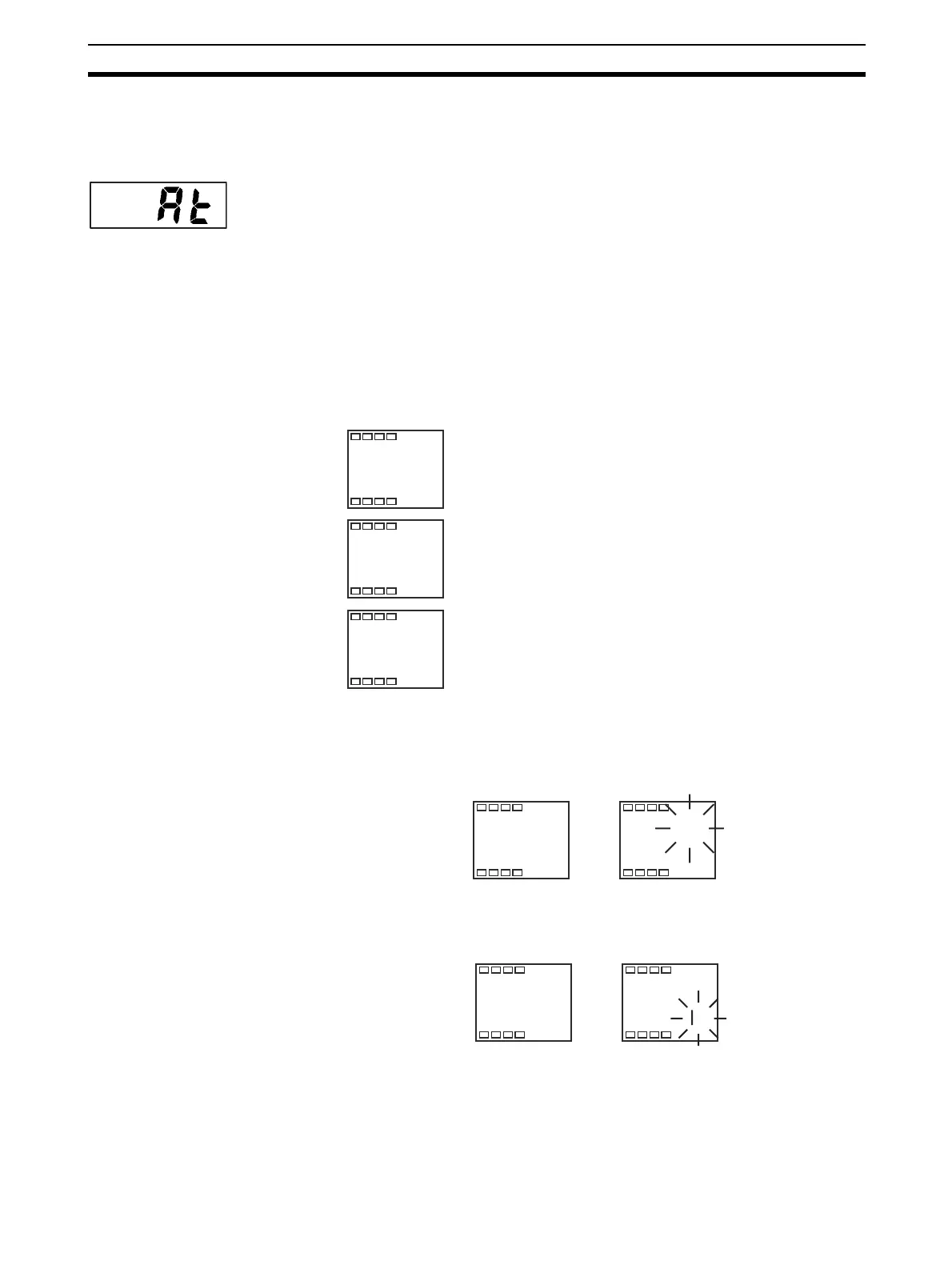
AT Operations AT (auto-tuning) is started when the “AT execute/cancel” parameter is set to
“ON”. During execution of AT, the No.1 display for the “AT execute/cancel”
parameter blinks. When AT ends, the “AT execute/cancel” parameter turns
OFF, and the No.1 display stops blinking.
If you move to the “operation level” during AT execution, the No.2 display
blinks to indicate that AT is being executed.
Only the “communications writing”, “run/stop” and “AT execute/cancel” param-
eters can be changed during AT execution. Other parameters cannot be
changed.
Adjustment level
Proportional band
Integral time
Derivative time
p
8.0
C
i
233
d
40
AT execute/cancel No.1 displa
During AT execution
at
off
at
on
PV/SP No.2 displa
Durin
AT execution
25
100
C
25
100
C

 Loading...
Loading...









