6-19
6 Process Data Communications and SDO Communications
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
6-1 Process Data Communications (PDO Communications)
6
6-1-5 I/O Operations for Major Fault Level Controller Errors and I/O Refreshing with Specified
Values
• You can select whether the master continues or stops communications with all slaves when a
communications error occurs. Refer to 5-4-1 Setting EtherCAT Master for details.
• If noise occurs or an EtherCAT slave is disconnected from the network, any current communi-
cations frames may be lost. If frames are lost, slave I/O data is not communicated, and unin-
tended operation may occur. The slave outputs behave according to the slave specifications.
For details, refer to relevant manuals for each slave. If a noise countermeasures or slave
replacement is required, perform the following processing.
• Program the _EC_InDataInvalid (Input Data Invalid), _EC_InData1Invalid (Input Data 1
Invalid), _EC_InData2Invalid (Input Data 2 Invalid) system-defined variables as an interlock
condition in the user program. Refer to 6-1-3 Checking the Validity of the Process Data.
• Set the PDO communications timeout detection count setting in the EtherCAT master to at
least 2. Refer to 5-4-1 Setting EtherCAT Master for the setting procedure.
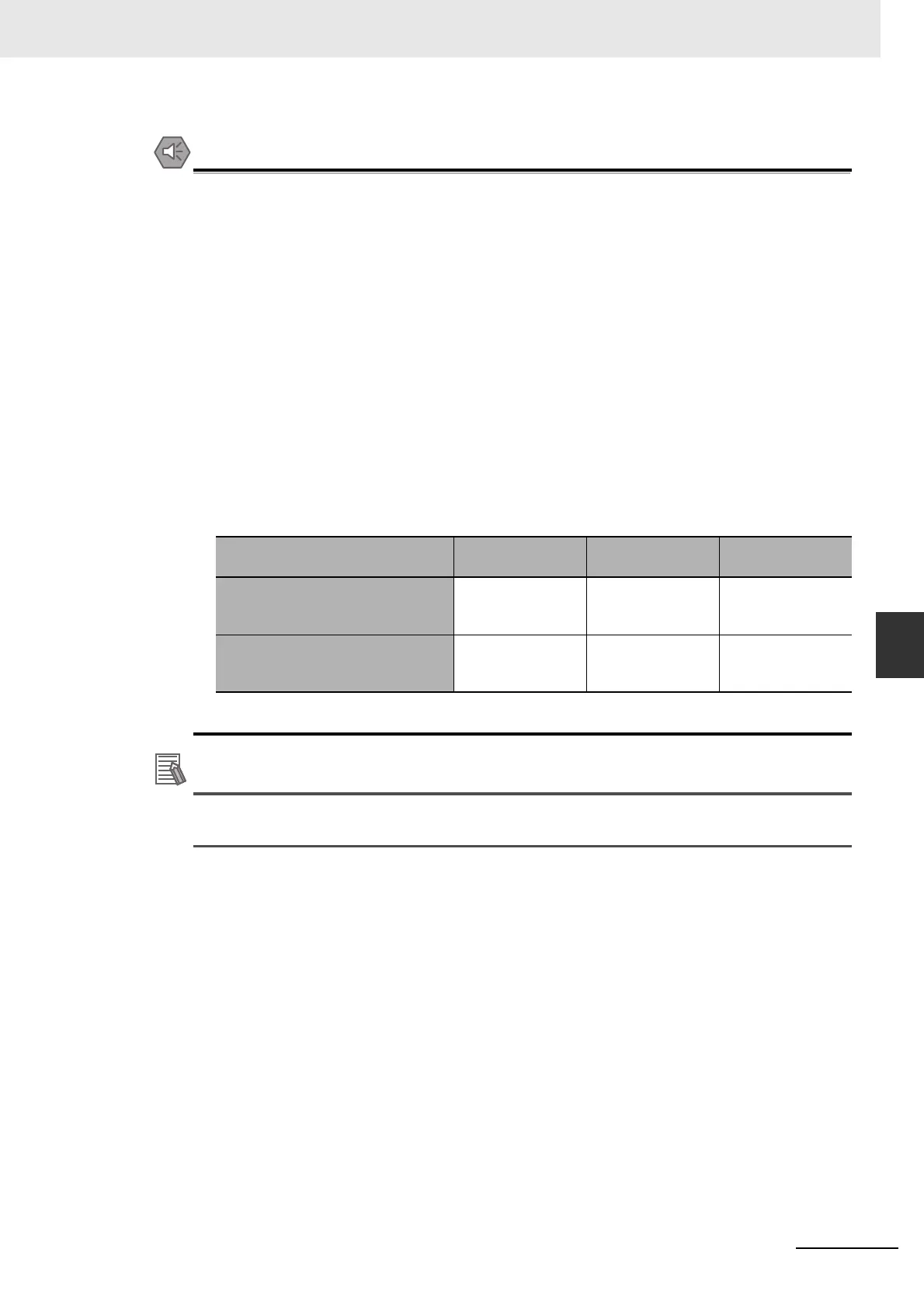
• If a communications error prevents the slaves from receiving signals from the master, the
slave settings will control the slave outputs. During the time that is required to change from
normal operation to a communications error status, frames will be lost. The outputs for lost
frames are different for synced slaves (Servo Drives and encoders) and non-synced slaves.
The slave settings will control the slave outputs for synced slaves. The previous values are
retained for the slave outputs for non-synced slaves.
For details, refer to relevant manuals for each slave.
You can check from the user program to see if I/O refreshing is normal by checking one of the
system-defined variables _EC_PDSlavTbl (Process Data Communicating Slave Table).
Normal operation Frames lost
Communications
error status
Outputs from synced slaves
(Servo Drives and encoders)
Controlled by the
values of device
variables.
Controlled by the
slave settings.
Controlled by the
slave settings.
Outputs from non-synced slaves
Controlled by the
values of device
variables.
The previous val-
ues are output.
Controlled by the
slave settings.

 Loading...
Loading...








