5 EtherCAT Communications
5 - 4
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
5-2 Structure of the CAN Application
Protocol over EtherCAT
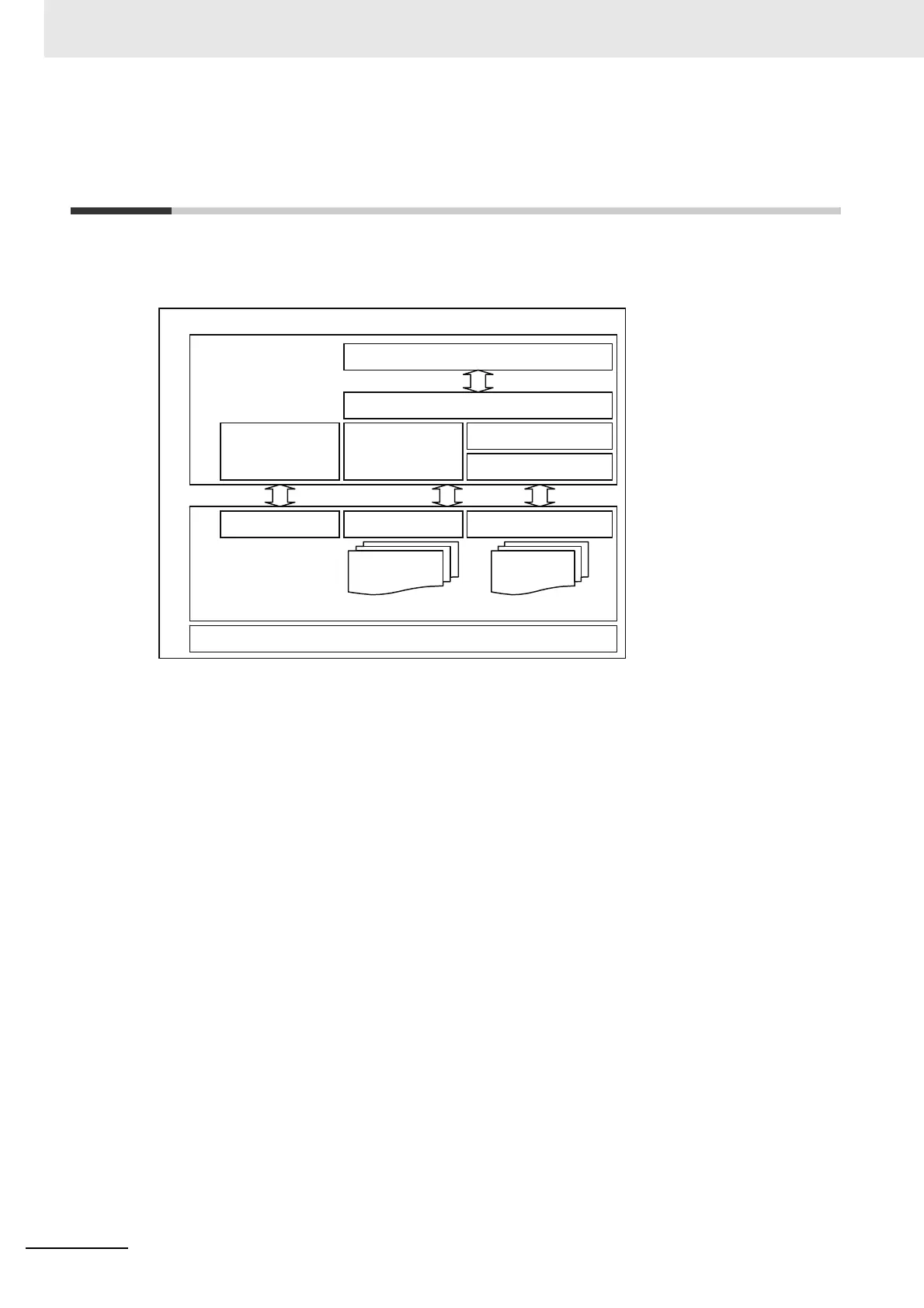
The structure of the CAN application protocol over EtherCAT (CoE) for the G5-series AC Servo Drives
With Built-in EtherCAT Communications, Linear Motor Type is described in this section.
Normally, multiple protocols can be transmitted using EtherCAT. The IEC 61800-7 (CiA 402) drive
profile is used for the G5-series AC Servo Drives with Built-in EtherCAT Communications, Linear Motor
Type.
The object dictionary in the application layer contains parameters and application data as well as
information on the PDO mapping between the process data servo interface and Servo Drive
application.
The process data object (PDO) consists of objects in the object dictionary that can be mapped to the
PDO. The contents of the process data are defined by the PDO mapping.
Process data communications cyclically reads and writes the PDO. Mailbox communications (SDO)
uses asynchronous message communications where all objects in the object dictionary can be read
and written.
FMMU
SyncManager
PDO (cyclic)
SDO (mailbox)
EtherCAT physical layer
EtherCAT data link layer
Servo Drive
Application layer
Communications
status
transitions
Servo Drive application
Process dataMailboxRegisters
Object dictionary
PDO mapping
 Loading...
Loading...
