6 - 13
6 Basic Control Functions
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
6-4 Profile Position Mode
6
6-4-2 Description of Function
*1 The Following error window object can be set to between 0 and 134,217,728, or 4,294,967,295. If the object is
set to 4,294,967,295, the detection of Following error will be disabled. If it is set to 0, a Following error will
always occur. If the set value is between 134,217,729 and 4,294,967,294, it is set to 134,217,728. In this case,
134,217,728 will be returned when the set value is read.
*2 For the Servo Drive to accept commands without fail, the object value must always be retained for two
communications cycles or more.
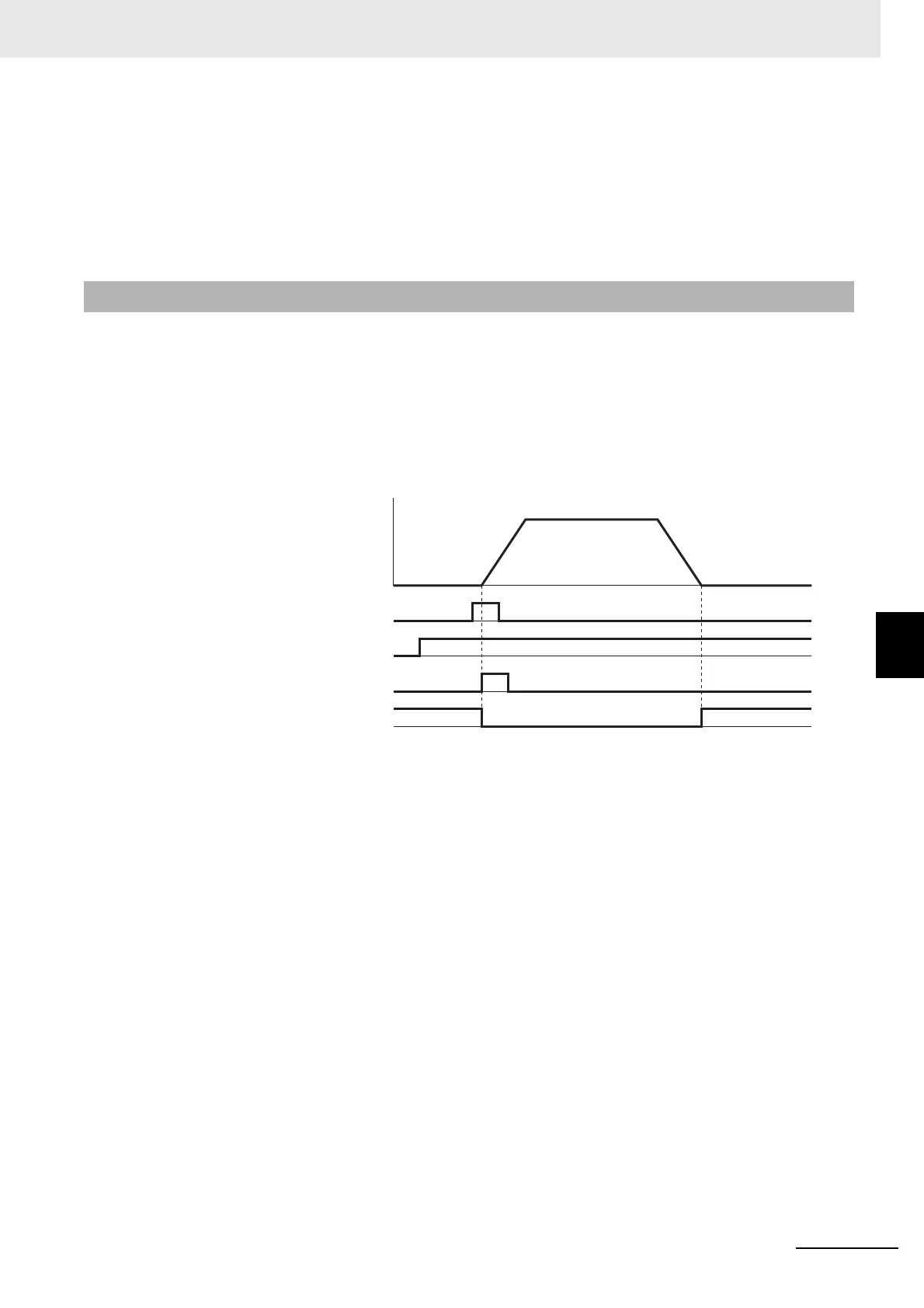
The G5-series Servo Drive can perform independent PTP positioning operation.
Set the Controlword (6040 hex) bit 5 (Change set immediately) to 1.
Set the Target position (607A hex) and the Profile velocity (6081 hex).
Changing the Controlword (6040 hex) bit 4 (New set-point) from 0 to 1 starts positioning to the set
target position.
6-4-2 Description of Function
6040 hex bit 4 New set-point
607A hex Target position
6041 hex bit 12 Set-point acknowledge
6041 hex bit 10 Target reached
Velocity
 Loading...
Loading...
