11 Adjustment Functions
11 - 12
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
This section describes the objects to be updated by the realtime autotuning function.
z Objects to be updated by the Realtime Autotuning Mode Selection (3002 hex)
and Realtime Autotuning Customization Mode Setting (3632 hex) settings
Setting the Realtime Autotuning Mode Selection (3002 hex) and the Realtime Autotuning
Customization Mode Setting (3632 hex) causes the following objects to be updated using the load
characteristic estimation value.
*1 The Mass Ratio will be updated if the Realtime Autotuning Customization Mode Setting (3632 hex) bits 2 to 3
are set to 1 (Update with the estimation result).
z Objects to be updated by the Realtime Autotuning Machine Rigidity Setting
(3003 hex) setting
Setting the Realtime Autotuning Machine Rigidity Setting (3003 hex) causes the following objects to
be updated.
For details, refer to Realtime Autotuning Object Table on page 11-11.
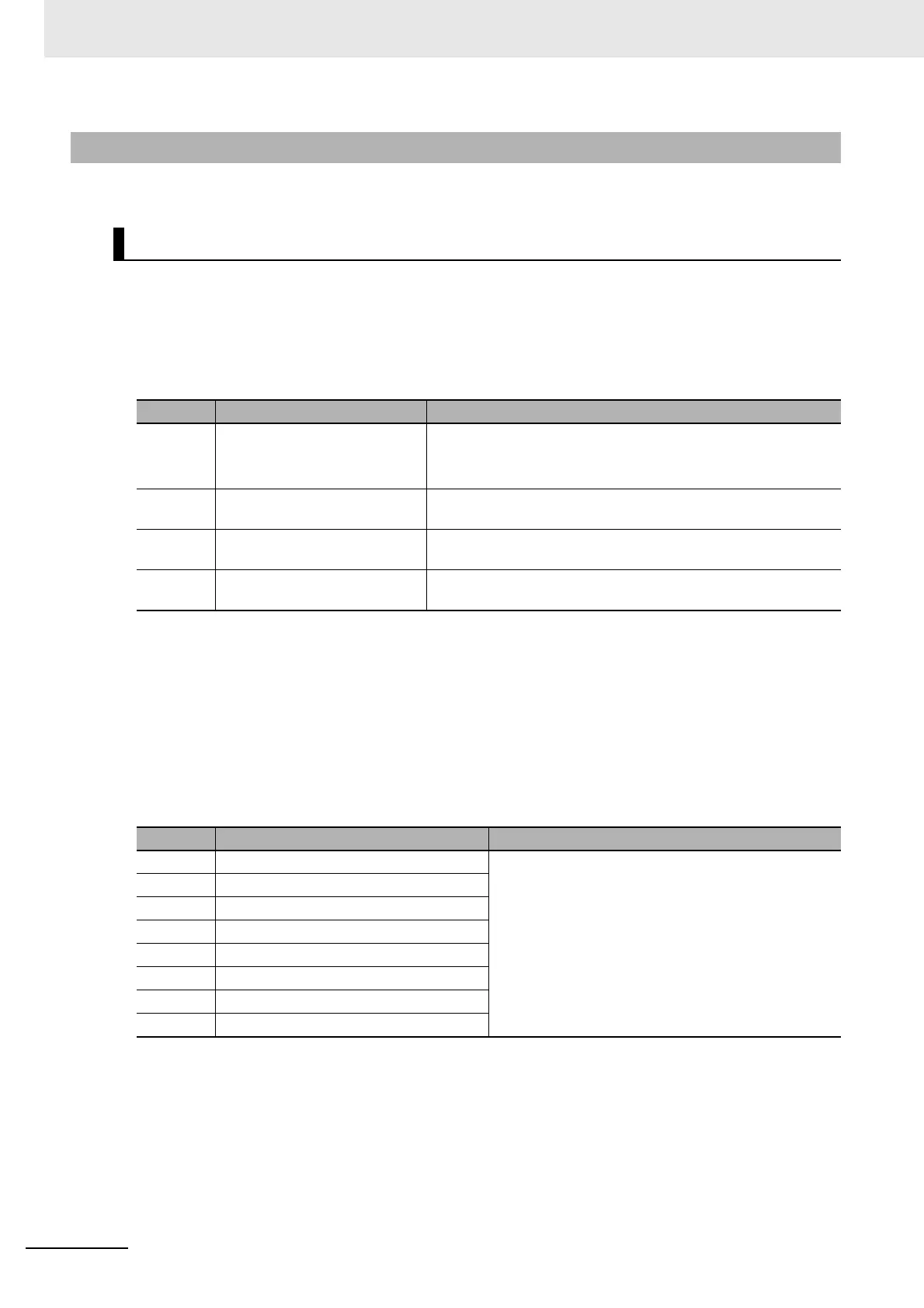
11-3-5 Objects to Be Updated
Objects to Be Updated
Index Name Description
3004 hex Mass Ratio Updated when realtime autotuning is operating.
However, in the customized mode, this object may not be
updated depending on its settings.
*1
3607 hex Force Command Value Offset Updated when the unbalanced load mode for realtime autotuning
is enabled.
3608 hex Positive Direction Force Offset Updated when the friction compensation/unbalanced load mode
for realtime autotuning is enabled.
3609 hex Negative Direction Force Offset Updated when the friction compensation/unbalanced load mode
for realtime autotuning is enabled.
Index Name Description
3100 hex Position Loop Gain Updated according to the rigidity.
3101 hex Speed Loop Gain 1
3102 hex Speed Loop Integral Time Constant 1
3104 hex Force Command Filter Time Constant 1
3105 hex Position Loop Gain 2
3106 hex Speed Loop Gain 2
3107 hex Speed Loop Integral Time Constant 2
3109 hex Force Command Filter Time Constant 2
 Loading...
Loading...
