9 - 47
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-7 Special Objects
9
9-7 Special Objects
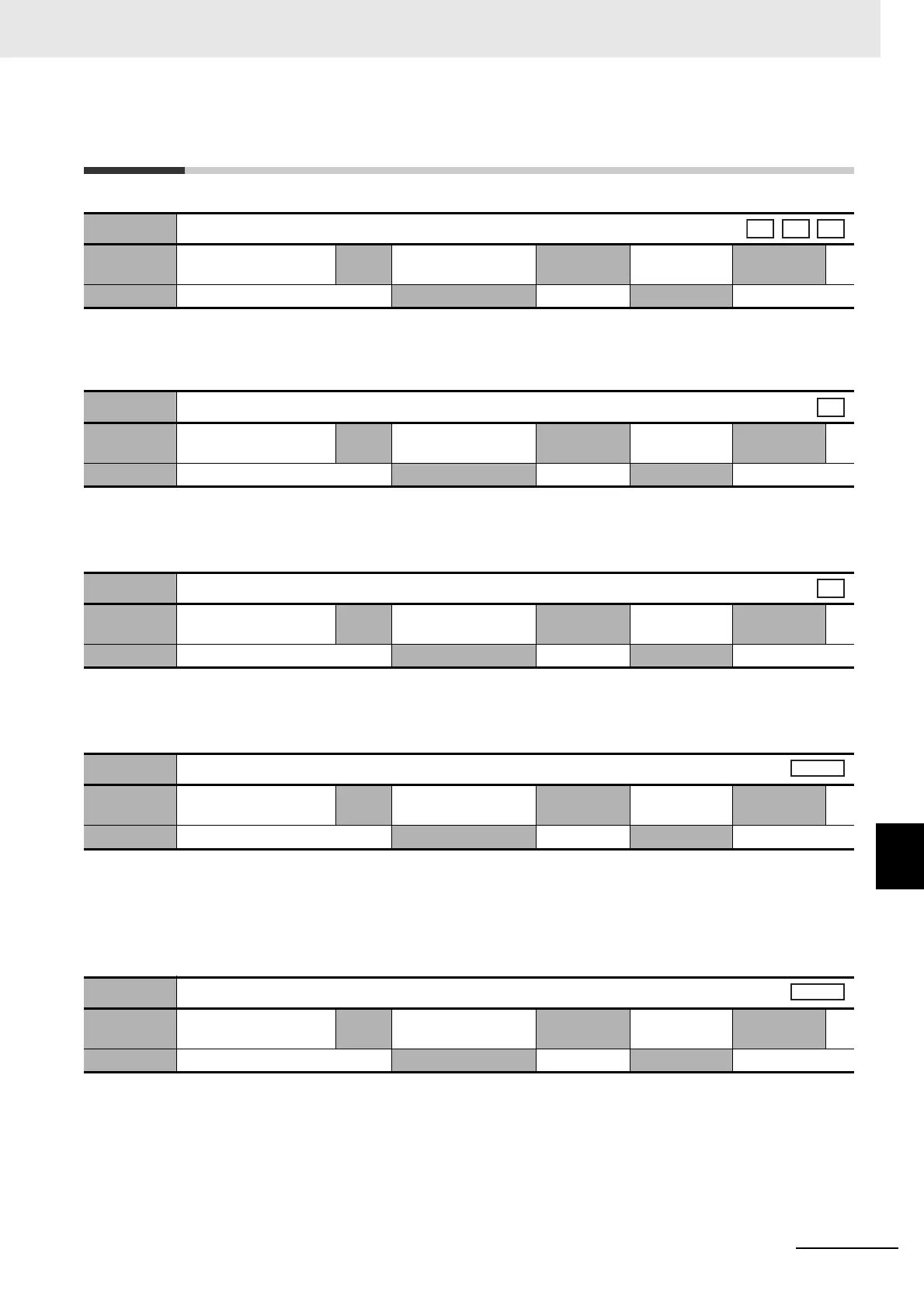
• Set the value for an Excessive Speed Deviation Error (Error No. 24.1).
• If the set value is 0, excessive speed errors will not be detected.
• Set effective time of Gain 3 of 3-step gain switching.
For details, refer to 7-10 Gain Switching 3 Function on page 7-37.
• Set Gain 3 as a multiple of Gain 1.
For details, refer to 7-10 Gain Switching 3 Function on page 7-37.
• Set the offset force to be added to force commands in the control mode other than the Force Control
Mode.
• Set the value in units of 1% of the rated force (100%).
For details, refer to 11-9 Friction Force Compensation Function on page 11-30.
• Set the value to be added to a force command during positive movement in the Position Control
Mode.
• Set the value in units of 1% of the rated force (100%).
For details, refer to 11-9 Friction Force Compensation Function on page 11-30.
3602 hex
Excessive Speed Deviation Setting
Setting
range
0 to 20,000
Unit
mm/s
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3605 hex
Gain 3 Effective Time
Setting
range
0 to 10,000
Unit
0.1 ms
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3606 hex
Gain 3 Ratio Setting
Setting
range
50 to 1,000
Unit
%
Default
setting
100 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3607 hex
Force Command Value Offset
Setting
range
–100 to 100
Unit
%
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3608 hex
Positive Direction Force Offset
Setting
range
–100 to 100
Unit
%
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
csp
pp
hm
csp
csp
 Loading...
Loading...
