10 Operation
10 - 8
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
At the Servo Drive, you must perform the following three types of basic settings appropriate to the
Linear Motor and external encoder you connect to it.
• Setting the Linear Motor and external encoder specifications
• Adjusting the current loop gain
• Setting the magnetic pole detection data
To set the data obtained as above, have the Sysmac Studio or CX-Drive ready. For details on operating
these tools, refer to 10-3 Linear Motor Setup on page 10-13.
The details of the objects that must be set for each of the above basic settings are described below.
Check the specifications of the Linear Motor you connect to the Servo Drive and set the necessary
objects according to the following table.
*1 Set the maximum value, instead of the effective value.
10-2-4 Preparing the Linear Motor for Operation
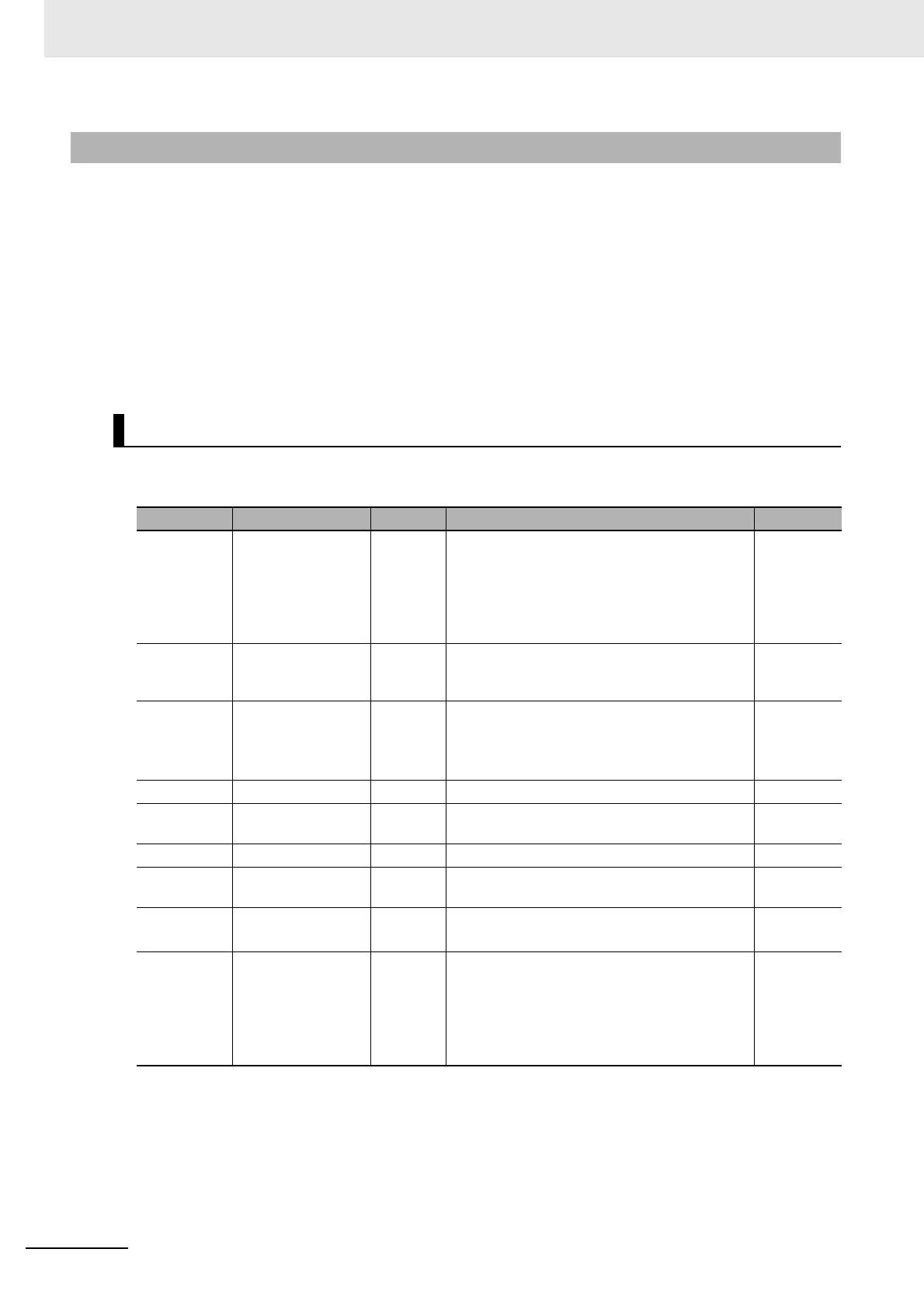
Setting the Linear Motor and External Encoder Specifications
Index Name Unit Description Reference
3323 hex External Feedback
Pulse Type
Selection
– Set the encoder type (90° phase difference,
serial communications incremental, or serial
communications absolute) of the selected
external encoder.
For the set value, refer to the specifications of
the selected equipment.
P. 9-27
3326 hex External Feedback
Pulse Direction
Switching
– Set the count direction of the external encoder. P. 9-28
3901 hex External Encoder
Resolution
0.001 µm Set the resolution of the selected external
encoder.
For the set value, refer to the specifications of
the selected equipment.
P. 9-61
3902 hex Pole Pitch 0.01 mm Set the magnetic pole pitch. P. 9-61
3904 hex Motor Coil Unit
Mass
0.01 kg Set the mass of the Linear Motor Coil Unit. P. 9-61
3905 hex Motor Rated Force 0.1 N Set the rated force of the Linear Motor. P. 9-62
3906 hex Motor Rated Rms
Current
0.1 Arms Set the rated current of the Linear Motor. P. 9-62
3907 hex Motor Peak
Absolute Current
0.1 A Set the maximum momentary current of the
Linear Motor.
*1
P. 9-62
3910 hex Overspeed Level mm/s Set the maximum speed appropriate for the
specifications of the selected Linear Motor,
external encoder, linear guides, or other
equipment.
For the set value, refer to the specifications of
the selected equipment.
P. 9-63
 Loading...
Loading...
