7 Applied Functions
7 - 36
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
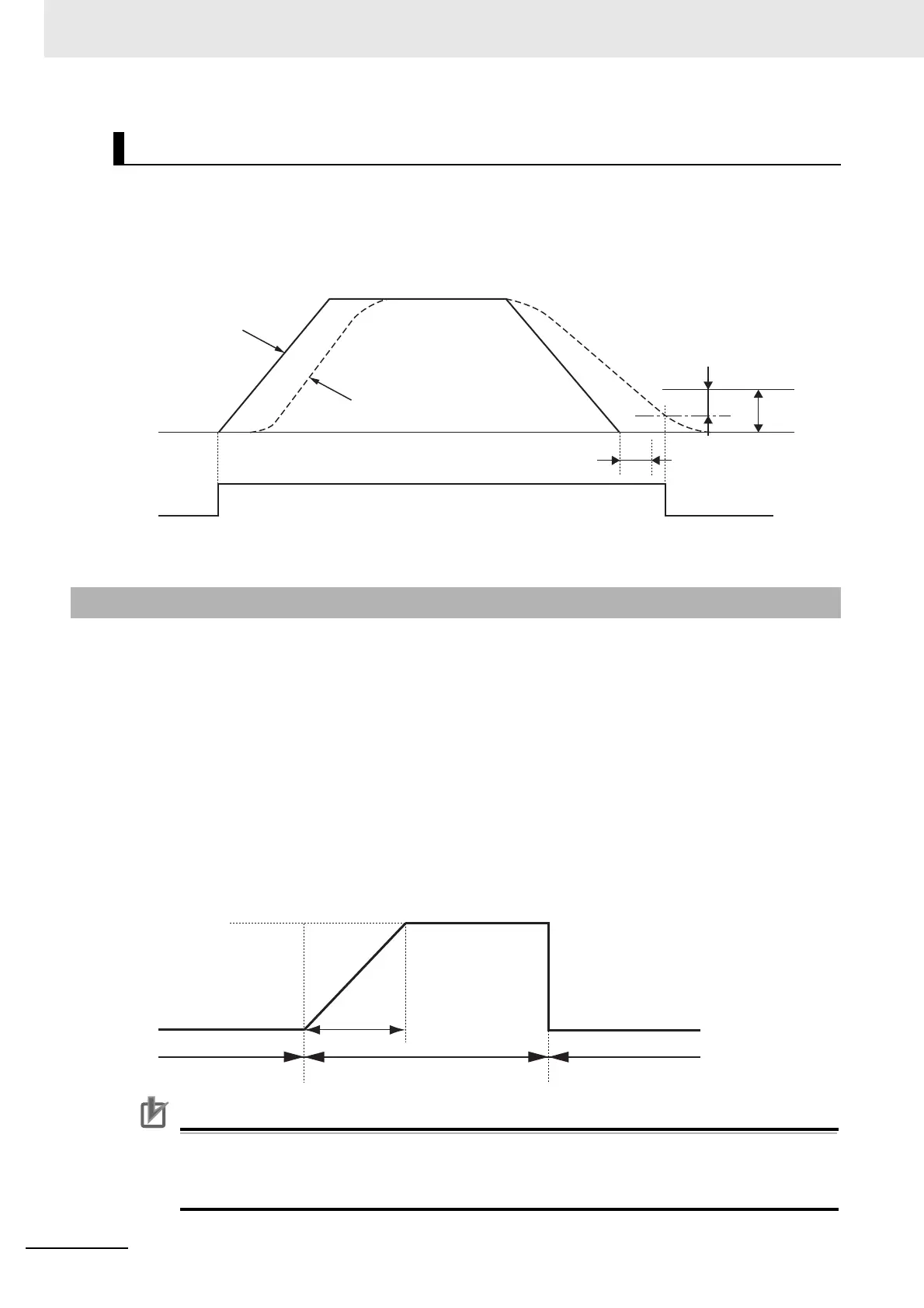
If there is a position command in Gain 1, the gain switches to Gain 2.
If a condition where there is no position command lasts for the Gain Switching Delay Time in Position
Control (3116 hex) and the absolute value of the actual motor speed is less than the value of the Gain
Switching Level in Position Control (3117 hex) minus the Gain Switching Hysteresis in Position Control
(3118 hex) [mm/s], the gain switches to Gain 1.
Note The “position command” is the Target Position (607A hex).
Torque fluctuations or vibration will occur if the position loop gain is changed too quickly during position
control or fully-closed control.
To suppress these, set a Position Gain Switching Time (3119 hex).
By setting the Position Gain Switching Time (3119 hex), the gain will be switched gradually when there
is a large change in the position loop gain.
If there is a large difference between Position Loop Gain 1 (3100 hex) and Position Loop Gain 2
(3105 hex), set the Position Gain Switching Time (3119 hex).
When the Position Loop Gain 1 increases, the gain changes in the set time.
Position Loop Gain 1 < Position Loop Gain 2
Precautions for Correct UsePrecautions for Correct Use
When the position loop gain is switched to a smaller value, Position Gain Switching Time
(3119 hex) is ignored and the gain is switched immediately.
In the above figure, this operation occurs when switching from Gain 2 to Gain 1.
10: Position Command + Actual Motor Speed
7-9-4 Position Gain Switching Time (3119 hex)
3116 hex
3118 hex
3117 hex
Gain 1 Gain 1
Gain 2
Actual motor speed
Position
command
3119 hex
Gain 1 Gain 2 Gain 1
Position Gain Switching Time [ms]
Gain 1 Gain 1
Gain 2
 Loading...
Loading...
