8 - 3
8 Safety Function
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
8-1 Safe Torque OFF Function
8
8-1-1 Safety Input Signals
There are 2 safety input circuits to operate the STO function.
• When safety input 1 or 2 turns “OFF,” the STO function will start operating within 5 ms of the input,
and the motor output force will be reduced to 0.
• Connect the equipment so that the safety input circuit is turned “OFF” to operate the STO function.
• Set the operation when the safety input turns “OFF” in the Fault reaction option code (605E hex).
Precautions for Correct UsePrecautions for Correct Use
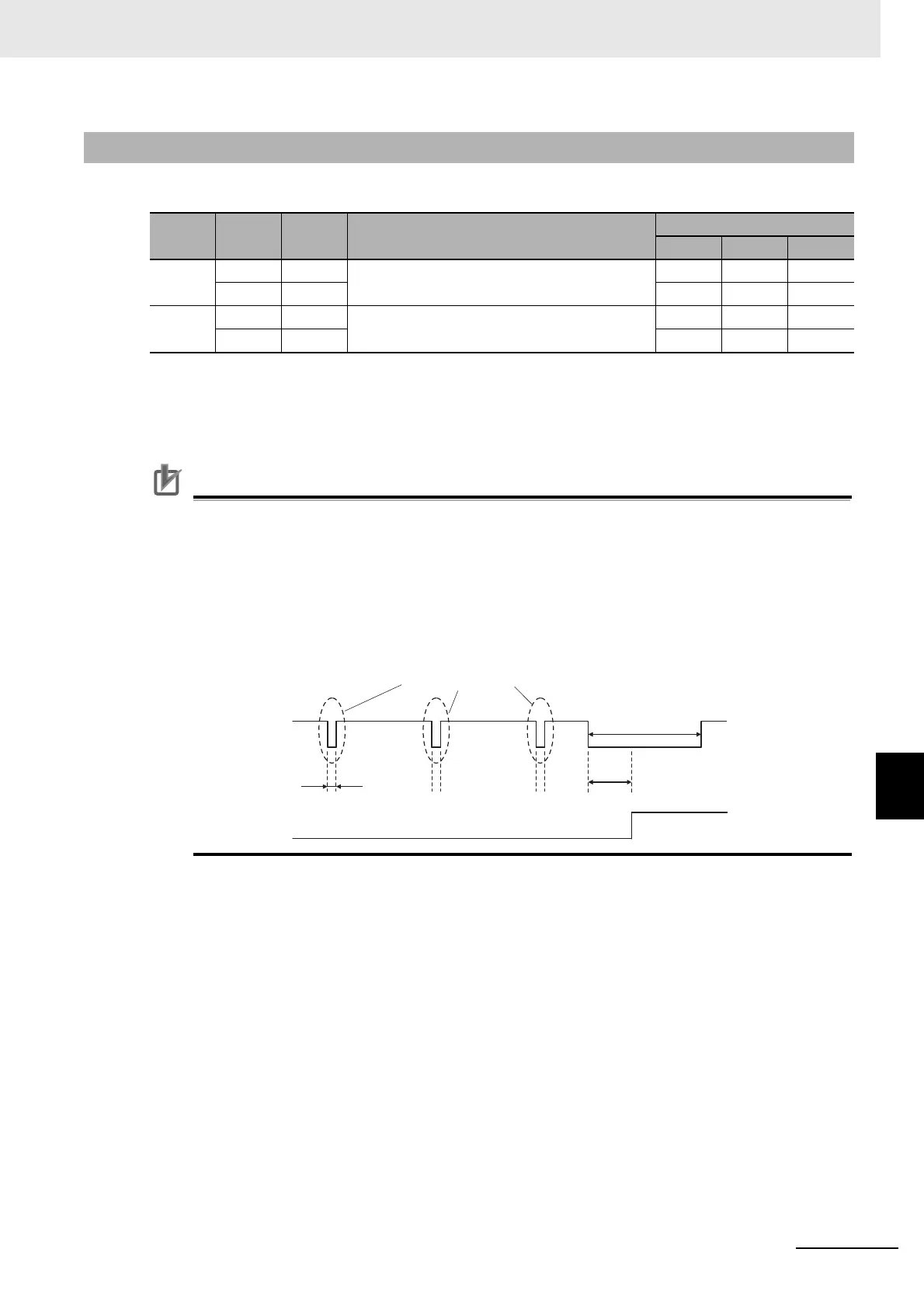
L pulses for self-diagnosis of safety device
When you connect a safety device, such as a safety controller or a safety sensor, the safety
output signal of the device may include L pulses for self-diagnosis. To avoid malfunction due
to the L pulses for self-diagnosis, a filter that removes the L pulses is built into the safety
input circuit. If the OFF time of the safety input signal is 1 ms or less, the safety input circuit
does not recognize it as “OFF.” To make sure that “OFF” is recognized, maintain the OFF
status of safety input signal for at least 5 ms.
8-1-1 Safety Input Signals
Signal
name
Symbol Pin No. Description
Control mode
Position
Speed Force
Safety
input 1
SF+ CN8-4 The upper arm drive signal of the power
transistor inside the Servo Drive is cut off.
333
SF– CN8-3 333
Safety
input 2
SF2+ CN8-6 The lower arm drive signal of the power
transistor inside the Servo Drive is cut off.
333
SF2– CN8-5 333
5 ms or more
Within 1 ms
Within 5 ms
STO status
For self-diagnosis L pulse
Normal operation
Safety
input signal
Servo Drive
operation
 Loading...
Loading...
