7 - 35
7 Applied Functions
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
7-9 Gain Switching Function
7
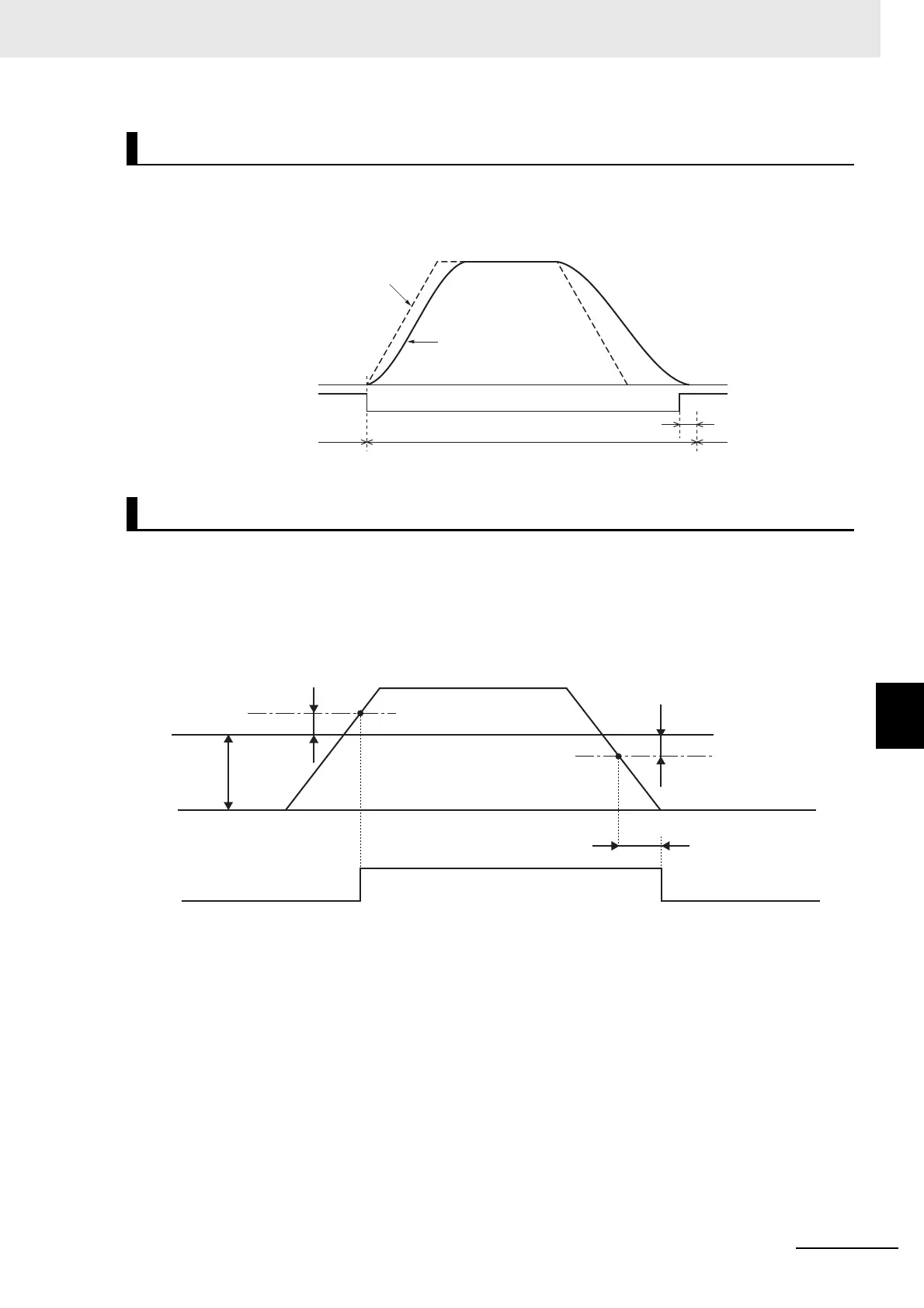
7-9-3 Diagrams of Gain Switching Setting
If the position command is not completed, the gain switches to Gain 2.
If the position command is completed and this condition lasts for the Delay Time, the gain switches back
to Gain 1.
If the absolute value of the actual motor speed exceeds the value of the Gain Switching Level plus the
Gain Switching Hysteresis [mm/s], the gain switches to Gain 2.
If the absolute value of the actual motor speed is less than the value of the Gain Switching Level minus
the Gain Switching Hysteresis [mm/s] and this condition lasts for the Delay Time, the gain switches
back to Gain 1.
Note The “speed command” is the Motor Control Effort (401A hex) [mm/s].
8: Positioning Not Completed
9: Actual Motor Speed
Position command
Gain 1 Gain 2
Actual motor speed
Delay time
Gain 1
Positioning completion
Positioning not completed
Speed command or Actual motor speed
Gain 1 Gain 1
Gain 2
Hysteresis
Level
Hysteresis
Delay time
 Loading...
Loading...
