7 Applied Functions
7 - 34
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
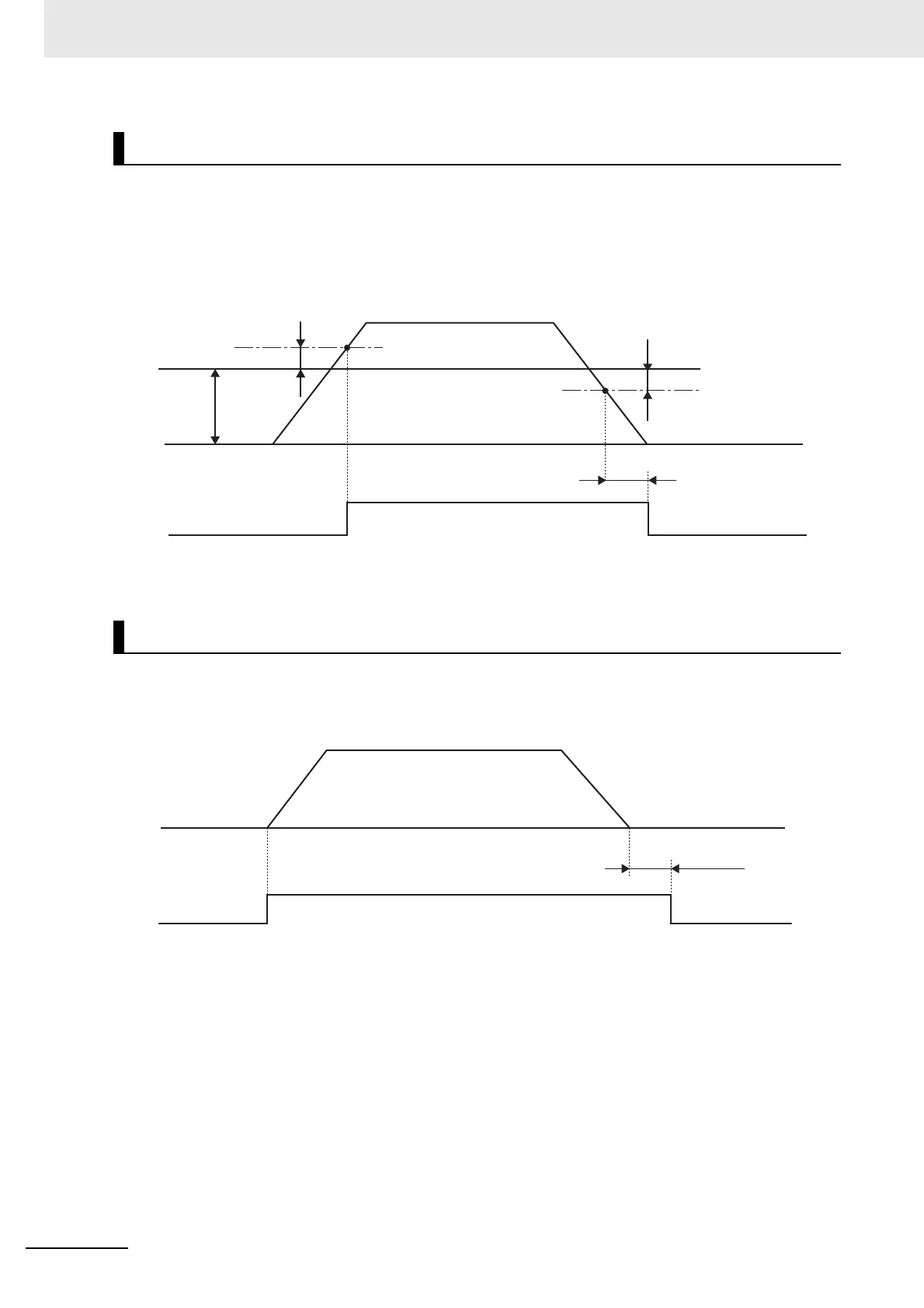
If the absolute value of the pulse position error exceeds the value of the Gain Switching Level plus the
Gain Switching Hysteresis [Pulse], the gain switches to Gain 2.
If the absolute value of the position error is less than the value of the Gain Switching Level minus the
Gain Switching Hysteresis [Pulse] and this condition lasts for the Delay Time, the gain switches back to
Gain 1.
Set the Level and the Hysteresis unit [Pulse] according to the external encoder resolution.
If the position command value is not 0, the gain switches to Gain 2.
If the position command value is 0 and this condition lasts for the Delay Time, the gain switches back to
Gain 1.
Note The “position command” is the Target Position (607A hex).
6: Pulse position error
7: Position Command
Pulse position error
Gain 1 Gain 1
Gain 2
Hysteresis
Level
Hysteresis
Delay time
Gain 1 Gain 1
Gain 2
Delay time
Position command
 Loading...
Loading...
