9 Servo Parameter Objects
9 - 62
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• Set the continuous force of the Linear Motor you connect to the Servo Drive.
For details, refer to 3-3 Linear Motor Specifications on page 3-28.
Precautions for Correct UsePrecautions for Correct Use
If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
• Set the continuous current of the Linear Motor you connect to the Servo Drive.
For details, refer to 3-3 Linear Motor Specifications on page 3-28.
Precautions for Correct UsePrecautions for Correct Use
• If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
• If the rated current value allowable for the Servo Drive is exceeded, a Motor Combination Error
1 (Error No. 60.1) will occur.
• Set the maximum momentary current of the Linear Motor you connect to the Servo Drive.
• Set the unit [0.1 A], instead of [0.1 Arms].
For details, refer to 3-3 Linear Motor Specifications on page 3-28.
Precautions for Correct UsePrecautions for Correct Use
• If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
•
If the rated current value allowable for the Servo Drive is exceeded, a Motor Combination Error 1
(Error No. 60.1) will occur.
• Use the following formula for unit conversion from Arms to A.
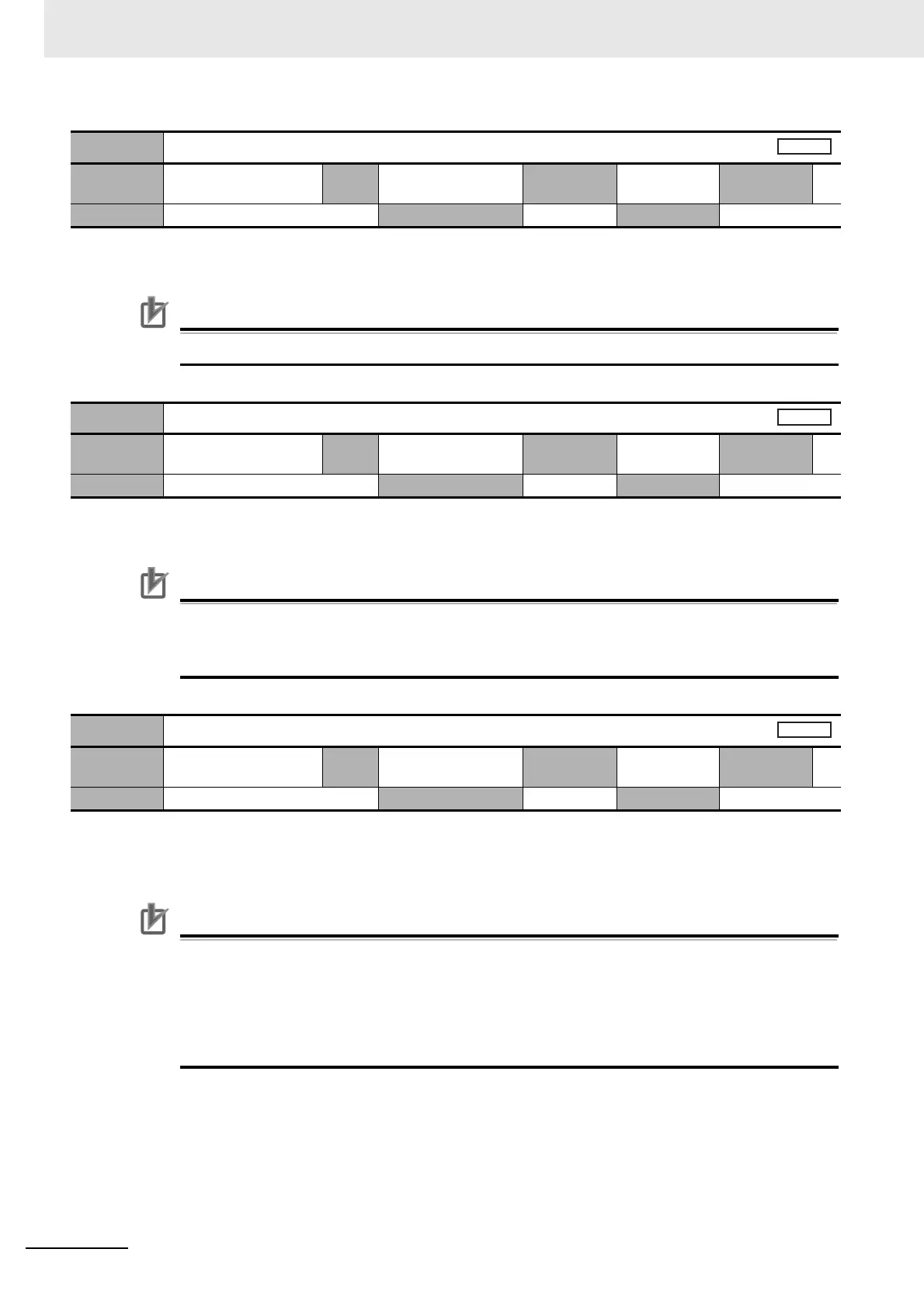
3905 hex
Motor Rated Force
Setting
range
0 to 32,767
Unit
0.1 N
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
3906 hex
Motor Rated Rms Current
Setting
range
0 to 32,767
Unit
0.1 Arms
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
3907 hex
Motor Peak Absolute Current
Setting
range
0 to 32,767
Unit
0.1 A
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
Motor Rated Rms Current [A] = Maximum Motor Current [Arms] x Square Root of 2
 Loading...
Loading...
