9 Servo Parameter Objects
9 - 26
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
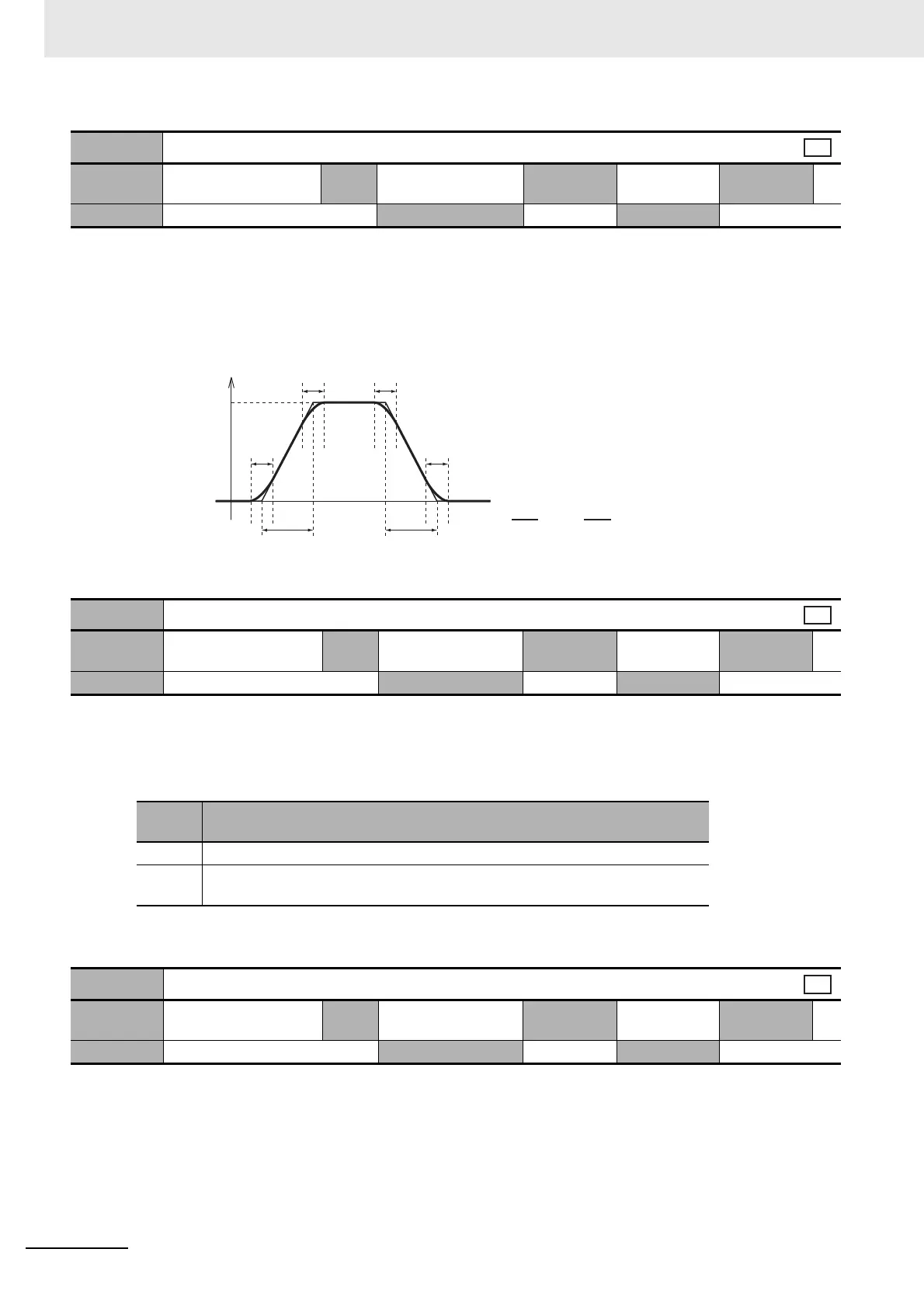
• The S-curve acceleration/deceleration function ensures smooth operation in applications where
linear acceleration or deceleration could cause impact due to a large change in the acceleration or
deceleration speed during start, stop, or other operation.
• This is achieved by adding a pseudo-S-curve acceleration/deceleration value to the linear
acceleration/deceleration speed command.
For details, refer to 7-8 Soft Start on page 7-24.
• Select the speed limit.
• Restricts the speed as the protection during force control.
Explanation of Settings
For details, refer to 6-3 Cyclic Synchronous Torque Mode on page 6-8.
• Set the speed limit value for force control.
• It controls that the speed during force control does not exceed the set value.
For details, refer to 6-3 Cyclic Synchronous Torque Mode on page 6-8.
3314 hex
S-curve Acceleration/Deceleration Time Setting
Setting
range
0 to 1,000
Unit
ms
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3317 hex
Speed Limit Selection
Setting
range
0 to 1
Unit
–
Default
setting
1 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
Set
value
Description
0 Select the value set on the Speed Limit Value Setting (3321 hex).
1 Select either the speed limit value (VLIM) via EtherCAT communications or the
value set by the Speed Limit Value Setting (3321 hex), whichever is smaller.
3321 hex
Speed Limit Value Setting
Setting
range
0 to 20,000
Unit
mm/s
Default
setting
20,000 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
2
ta
2
td
ta td
ts ts
tsts
Target
speed
[Vc]
ta = Vc/Maximum motor speed × 3312 hex × 1 ms
td = Vc/Maximum motor speed × 3313 hex × 1 ms
ts = 3314 hex × 1 ms
Be sure that ts is smaller than the values
obtained by the divisions of
and .
Speed [mm/s]
cst
cst
 Loading...
Loading...
