10 - 15
10 Operation
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
10-3 Linear Motor Setup
10
10-3-2 Operation from the CX-Drive
To connect the CX-Drive with the Servo Drive via EtherCAT connection, you must configure in advance
the communications settings for the EtherCAT master controller.
For EtherCAT communications settings, refer to the manual for your controller.
1
Connect a sensor or other device to the connector CN1.
2
Connect the CX-Drive to the Servo Drive via a network cable.
3
Turn ON the power supply (12 to 24 VDC) to the CN1 control inputs (+24VIN, COM).
4
Turn ON the Servo Drive power.
This establishes EtherCAT communications if the required communications settings have been
configured in advance.
If EtherCAT communications have not been established, configure communications settings at
this point.
5
On the computer, start the CX-Drive and go online with the Servo Drive via EtherCAT
communications.
1
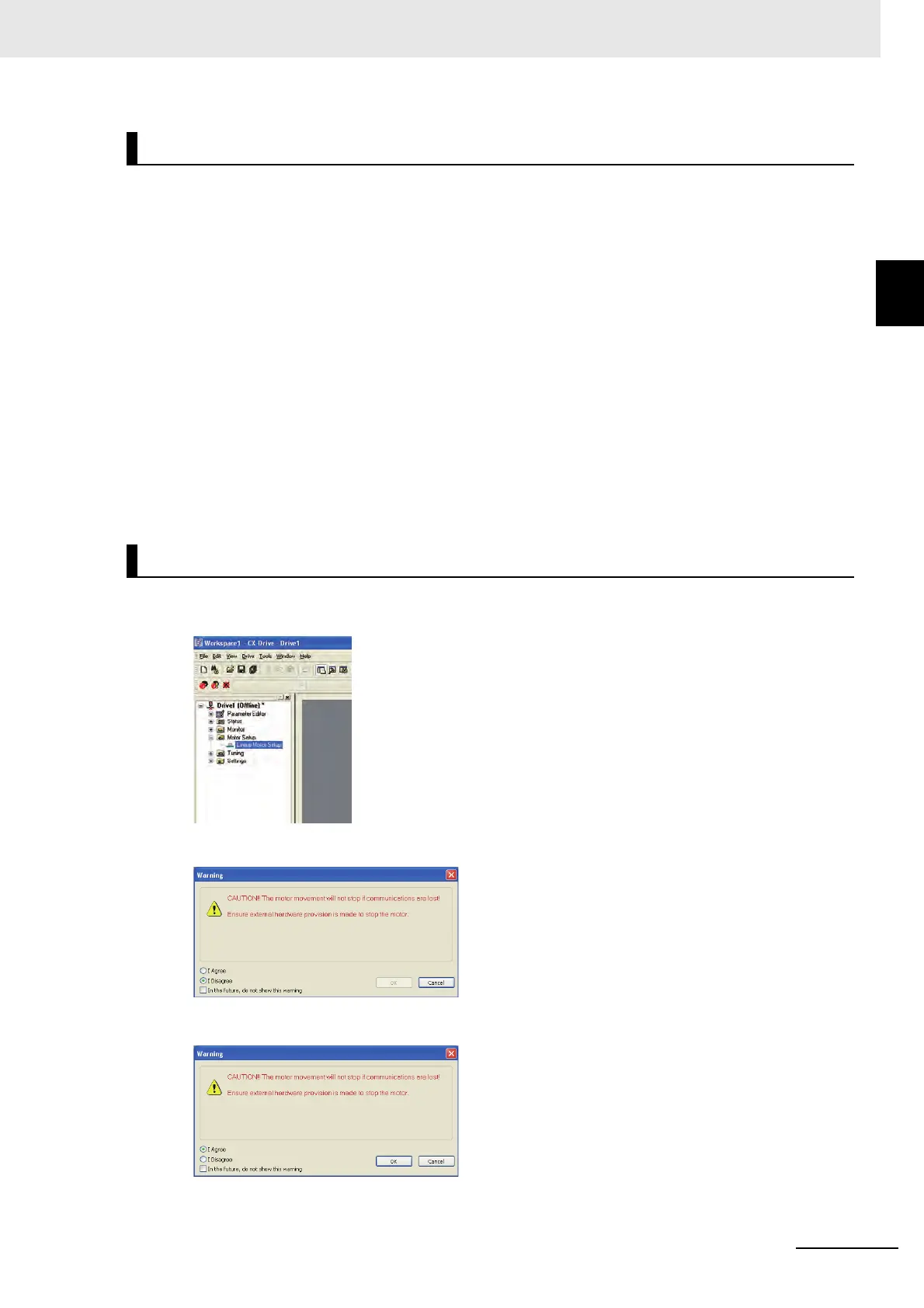
To start [Linear Motor Setup], double-click [Linear Motor Setup] under [Motor Setup] in
the workspace.
The following screen appears.
2
Select [I Agree] and click the [OK] button.
The Linear Motor Setup wizard starts.
For EtherCAT Connection
Starting the Linear Motor Setup
 Loading...
Loading...
