10 - 21
10 Operation
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
10-3 Linear Motor Setup
10
10-3-2 Operation from the CX-Drive
15
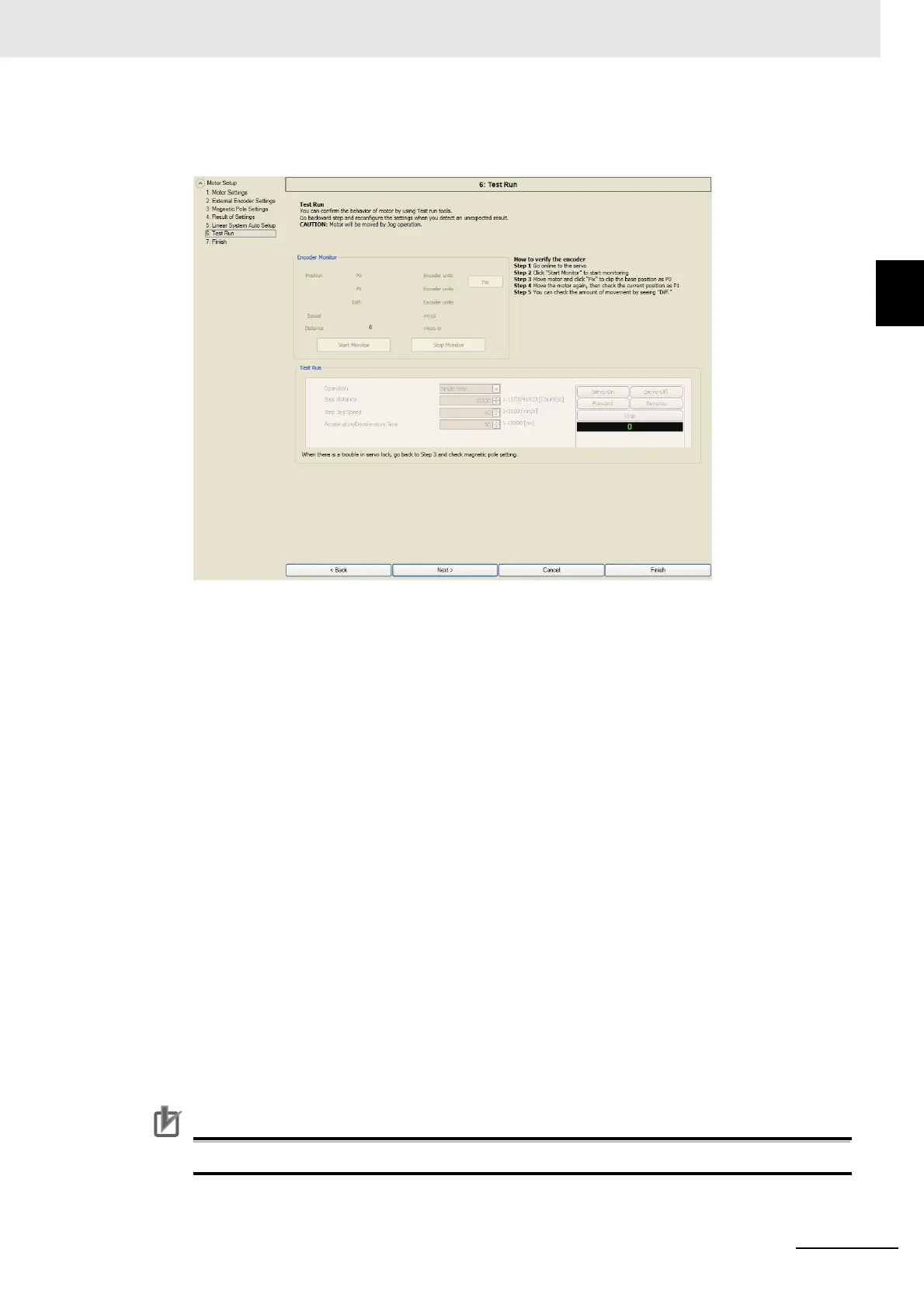
Select [Test Run] from [Next Action] and click [Next] button.
The following Test Run screen appears.
16
Check how the external encoder operates via the external encoder monitor.
Clicking [Start Monitor] enables the monitoring of the current external encoder value. Check the
encoder value from the following view points:
• Move the Motor Coil Unit slightly to make sure that the direction in which the current value (or
reading of the external encoder) increases/decreases matches that of the coordinate value for
the system.
• After saving the current position to P0 on the screen, move the moving table slightly by hand
and read the count value in P1. Doing this at a marked position on the machine enables
quantitative measurement in units of pulses/mm.
• Check the relationship between the value displayed in P1 by the external encoder and the
mechanical position of the Motor Coil Unit.
If the direction or pitch of the external encoder does not match the current value from the
encoder monitor, check the specifications of the external encoder and initialize the Linear Motor
settings from the beginning. In particular, check that the settings in steps 3 to 5 and step 8 have
been completed correctly.
17
Perform a test run.
Perform the servo lock and jog operations to check that the Linear Motor operates as intended.
If the servo lock operation fails, check the settings again from step 1. In particular, check that, in
step 5, the Magnetic Pole Detection Method has been selected correctly.
If the servo lock operation is successful but the jog operation fails, return to step 4 and check
that the external encoder resolution setting matches the external encoder specifications.
Precautions for Correct UsePrecautions for Correct Use
Note that the Linear Motor operates during the jog operation.
 Loading...
Loading...
