A - 9
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-5 Changing the Mode of Operation
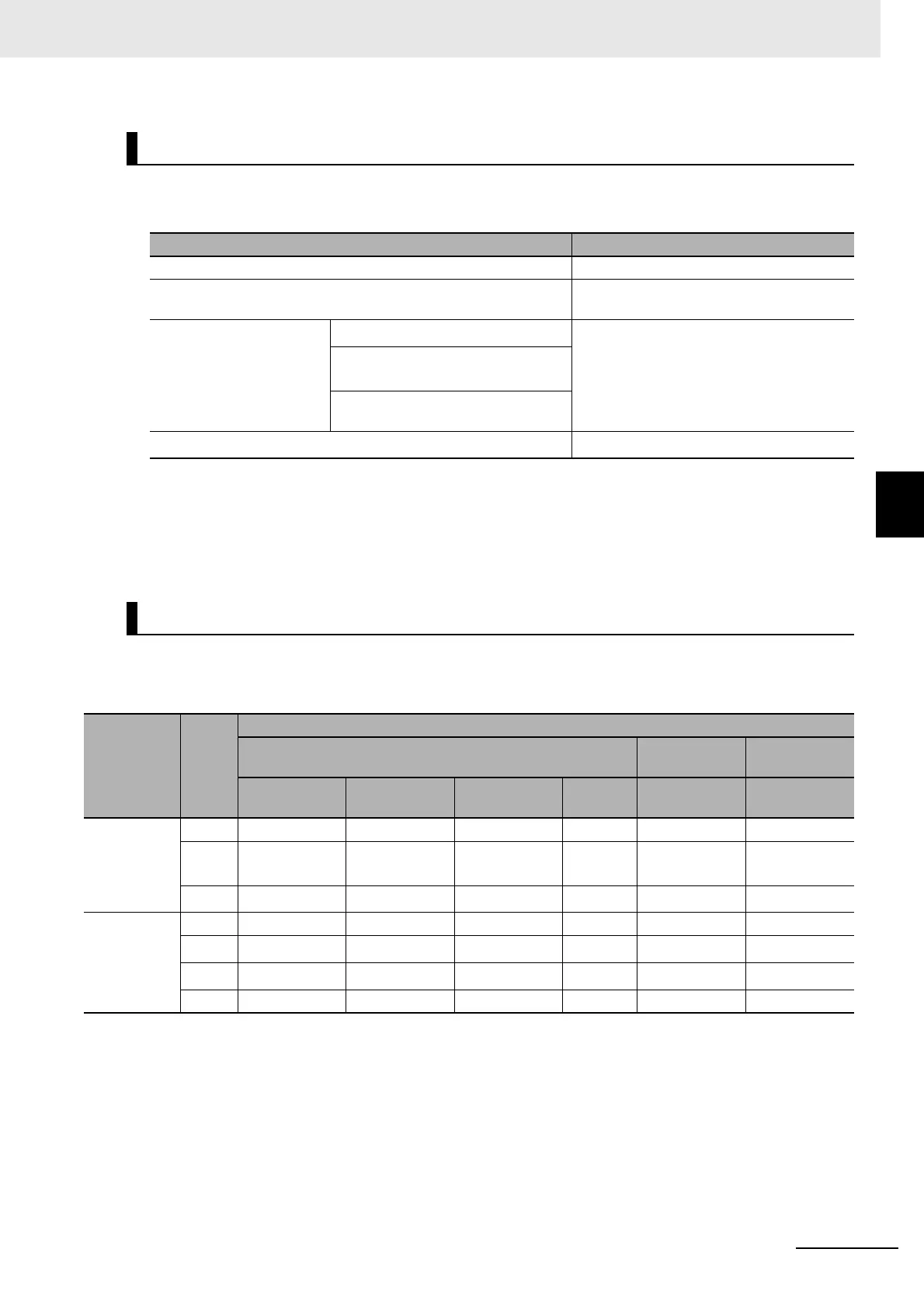
The actual mode of operation can be checked from the Modes of operation display (6061 hex).
The display is as follows depending on the state of the Servo Drive:
*1 When Drive Prohibition Input Selection (3504 hex) = 0.
*2 The stop process is executed using a deceleration stop command generated independently inside the Servo
Drive.
*3 Applicable when the Undervoltage Error Selection (3508 hex) is set to 0.
*4 The Servo Drive is in a Fault reaction active or Fault state during an error.
Some of the bits in the Statusword (6041 hex) and Statusword 1 (4000 hex) are dependent on the
control mode. Their relationship with the Modes of operation display (6061 hex) is shown in the
following table:
*1 When commands in the Controlword (6040 hex) are not followed when the servo is ON, this bit will be 0 (ignored).
For details, see figures (a) to (c) below.
*2 When commands in the Controlword (6040 hex) are not followed when the servo is ON, the preceding value is retained.
For details, see figure (d) below.
*3 When commands in the Controlword (6040 hex) are not followed when the servo is ON, this bit will be 0 (ignored).
For details, see figures (b) and (c) below.
Modes of Operation Display
Servo Drive status Modes of operation display (6061 hex)
Servo OFF (not operation enabled state) 0: Not specified
Servo ON (operation enabled state) The value that is shown depends on the
setting of Modes of operation (6060 hex).
Not following commands in
the Controlword (6040 hex)
when the servo is ON
Drive prohibition
*1
The value that is shown depends on the
setting of Modes of operation (6060 hex).
*2
Deceleration stop in progress due to
main circuit power OFF
*3
Deceleration stop in progress due to
Servo OFF
Deceleration stop in progress due to an error
0: Not specified
*4
Bit Displays According to Modes of Operation Display (6061 hex)
Object Bit
Modes of Operation Display (6061 hex)
Position Control Mode
Speed Control
Mode
Force Control
Mode
csp pp hm
Not
specified
csv cst
6041 hex 10 0 Target reached Target reached 0 0 0
12 Target position
ignored
*1
Acknowledge
Home attained
*2
0 Target velocity
ignored
*1
Target torque
ignored
*1
13 Following error Following error
Homing error
*3
00 0
4000 hex 1 DEN DEN DEN 1 0 0
40 0 000
VLIM
*3
70000
VCMP
*3
0
8 NEAR NEAR NEAR 1 0 0
 Loading...
Loading...
