Start-Up
4.7 Commissioning
4-85
SINUMERIK 802S
6FC5 597–2AA00–0BP2 (01.02)
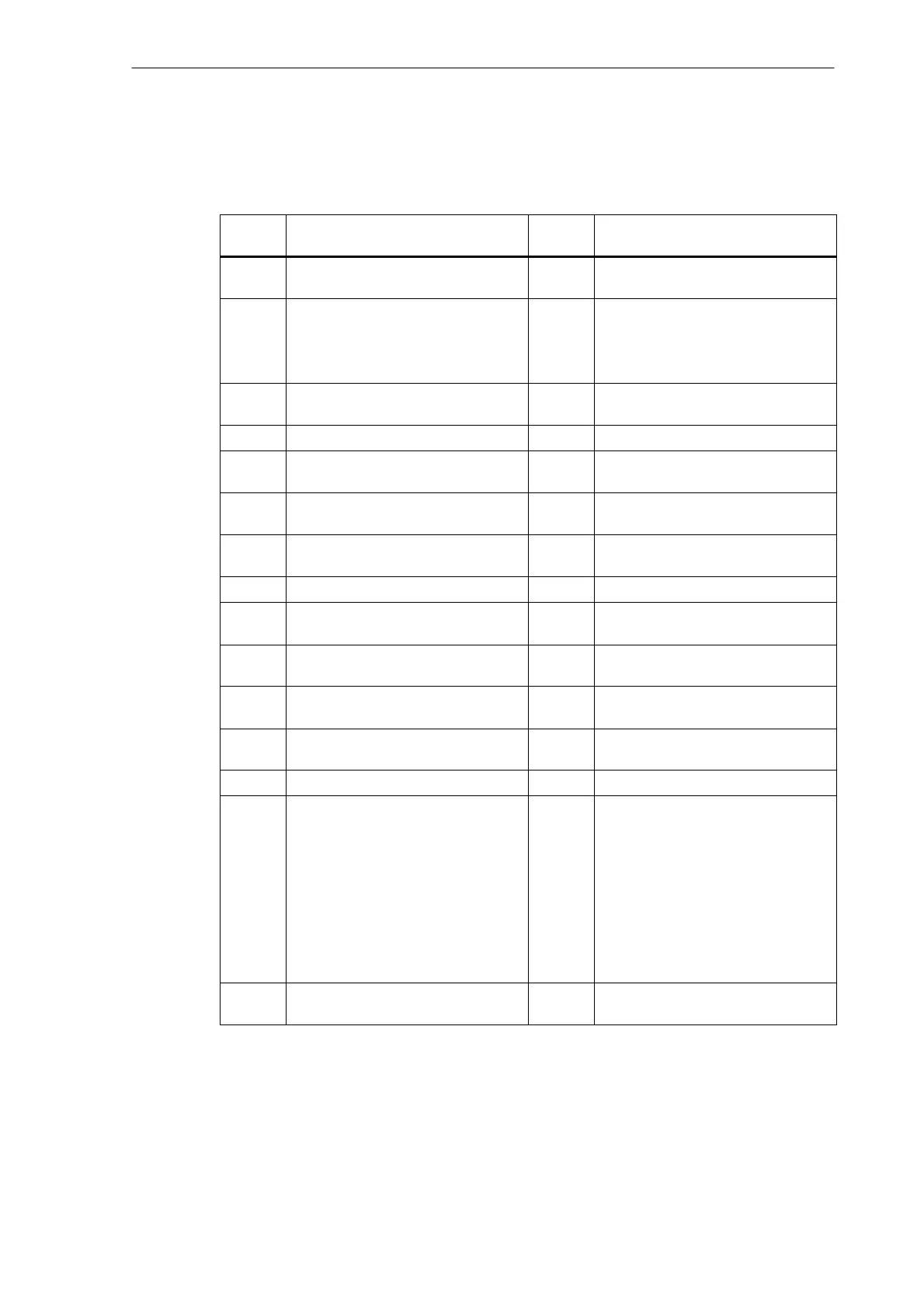
After the machine data have been set, the stepper motor axes are ready to traverse, as far as
the machine data are concerned, and only fine adjustments are required.
Number Description
Default
Value
Setting or Remark
30130
Output type of setpoint (setpoint
branch): 0
0 2
30240
Type of actual value acquisition (ac-
tual position value) (encoder no.)
0: Simulation
3: Encoder for stepper motor
0 3
31020
Encoder markings per revolution (en-
coder no.)
1000 Steps per stepper motor revolution
31030 Pitch of leadscrew 10 Leadscrew pitch
31050
31060
Denominator load gearbox (control
parameter no.): 0...5
1
Load and resolver transmission ra-
tios
31100
Steps for monitoring rotation
2000
Repetition cycle of BERO in measu-
ring system increments
31400
Schritte pro Schrittmotorumdrehung
1000
Steps per stepper motor revolution
(must be identical to MD 31020)
32000 Maximum axis velocity 10000 30000 (max. axis velocity)
32100
Traversing direction (not control di-
rection)
1 Reversal of direction of motion
32110
Sign actual value (control direction)
(encoder no.)
1 Measuring system reversal
32200
Servo gain factor (control parameter
set no.): 0...5
2,5 2.5 (position controller gain)
32260
Rated motor speed (setpoint
branch): 0
3000 Motor speed
34070 Reference point positioning velocity 300 Positioning speed when referencing
34200
Type of position measuring system
0: No ref. point appr.; if absolute en-
coder exists: REFP_SET_POS ac-
cepted
1: Zero pulse (on encoder track)
2: BERO
3: Distance-coded reference marks
4: Bero with two edges
5: BERO cam
1
2: Single–edge BERO
4: Double–edge BERO
36200
Threshold value for velocity monitor-
ing (control parameter set no.): 0...5
11500
Threshold value for velocity monito-
ring
To solve monitoring problems, set the following machine data:

 Loading...
Loading...









