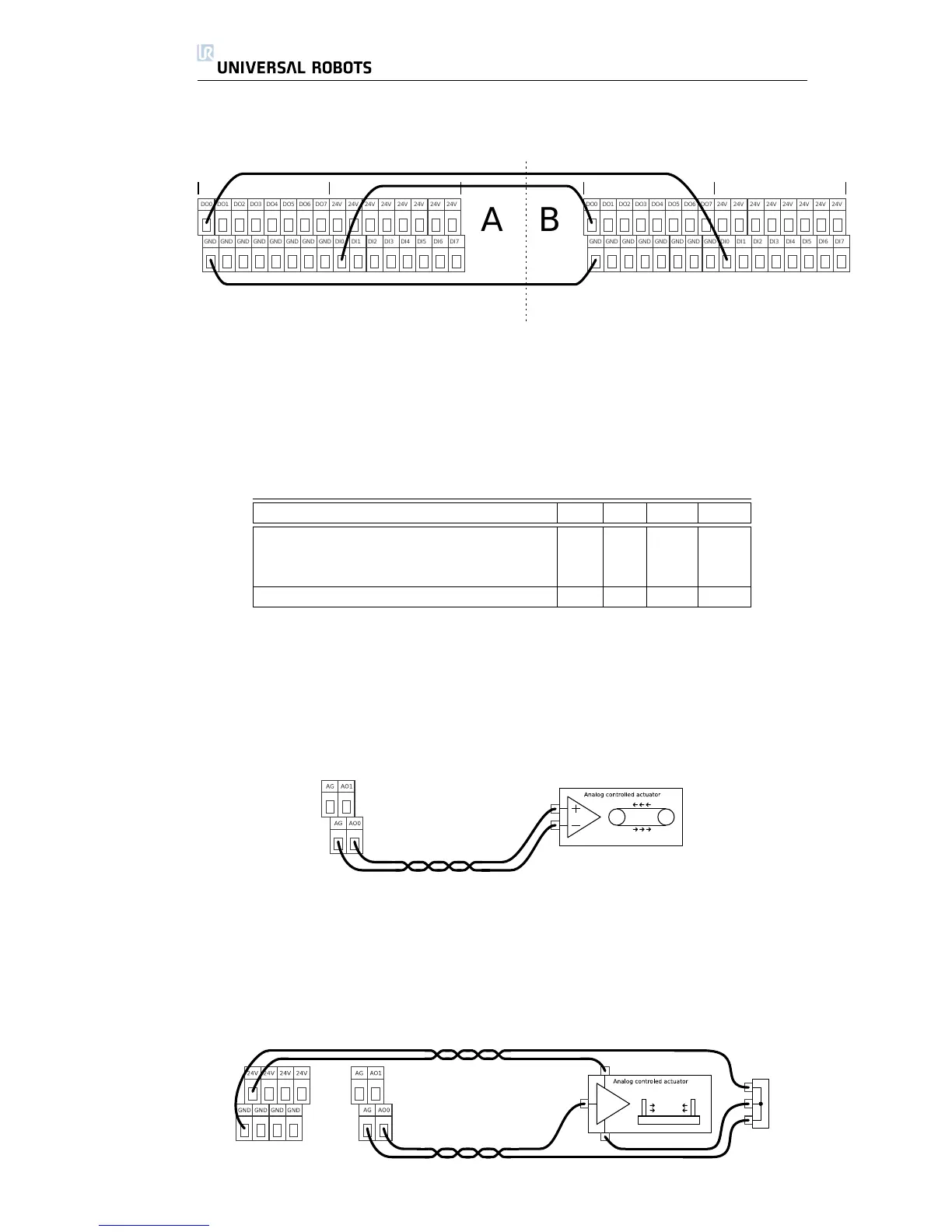
If communication with other machinery or PLCs is needed they must use pnp
technology. Remember to create a common GND connection between the
different interfaces. An example where two UR robots (A and B) are communi-
cating with each other is illustrated above.
2.4.3 Analog Outputs
Parameter Min Typ Max Unit
Valid output voltage in current mode 0 - 10 V
Valid output current in voltage mode -20 - 20 mA
Short-circuit current in voltage mode - 40 - mA
Output resistance in voltage mode - 43 - ohm
The analog outputs can be set for both current mode and voltage mode, in
the range of 4-20mA and 0-10V respectively.
To illustrate clearly how easy it is to use analog outputs, some simple exam-
ples are shown.
Using the Analog Outputs
This is the normal and best way to use analog outputs. The illustration shows
a setup where the robot controller controls an actuator like a conveyor belt.
The best result is accomplished when using current mode, because it is more
immune to disturbing signals.
Using the Analog Outputs, Non-Differential Signal
All Rights Reserved
24 UR10