A.3. GUI
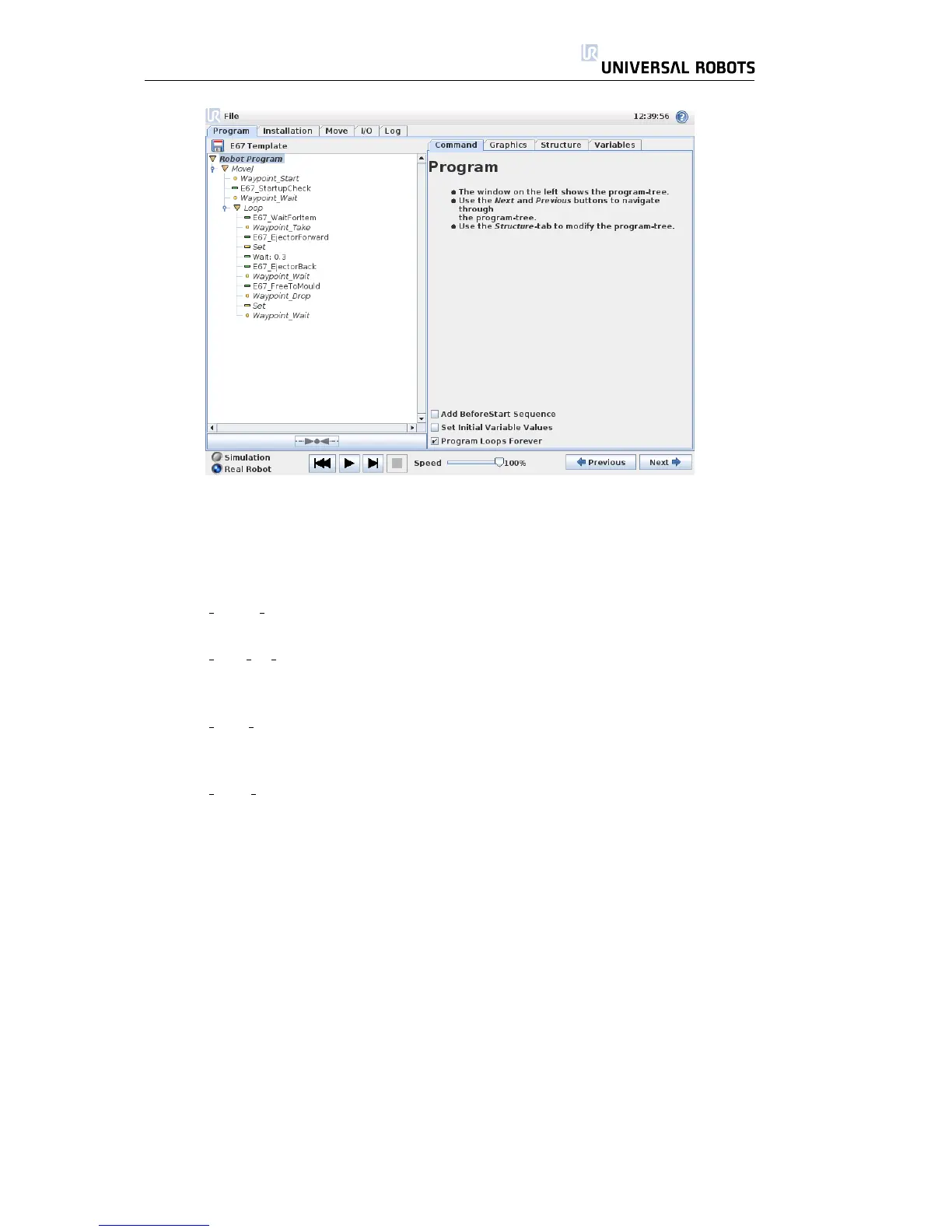
The euromap67 program template is prepared for performing simple interac-
tion with an IMM. By specifying only a few waypoints, and a pair of I/O actions,
the robot is ready for handling the objects made by the IMM. The waypoints are:
• WP home position: The robot starting point for the procedure.
• WP wait for item: The waypoint where the robot will be placed while wait-
ing for an item to be ready from the IMM.
• WP take item: The waypoint where the robot will take the item from (inside)
the IMM.
• WP drop item: The waypoint where the robot will drop the item just fetched
from the IMM.
The two Action nodes are intended for controlling a tool capable of grabbing
and holding the items from the IMM, and then releasing and dropping them
when moved outside the IMM.
Now, the procedure will cycle through the steps, continously removing newly
constructed items from the IMM. Obviously, the Loop node should be customized
such that the robot will only run this cycle as long as there are items to take.
Also, by customizing the MoveJ node, the robot movement speed should be
adjusted to fit the IMM cycle time, and, if necessary, the level of fragility of the
items. Finally, each euromap67 structure is customizable to suit the specific IMM
procedure.
A.3.2 I/O overview and troubleshooting
The euromap67 I/O overview is found under the I/O tab.
All Rights Reserved
47 UR10