3.4. Emergency situations
article 5.10.5 of the EN ISO 10218-1:2006. This standard is harmonized under the
machinery directive and it specifically states that a robot can operate as a
collaborative robot (i.e. without safety guards between the robot and the op-
erator) if it is in compliance with the article 5.10.5. The risk assessment still needs
to conclude that the overall robot installation is safe enough of course. A copy
of the certification report can be requested from Universal Robots.
The standard EN ISO 10218-1:2006 is valid untill the 1st of January 2013. In
the meantime the newer version EN ISO 10218-1:2011 and the corrosponding EN
ISO 10218-2:2011 addressed to the integrators are also valid. Where the EN ISO
10218-1:2006 specifically states that a maximum force of 150N combined with
a supporting risk assesment is required for collaborative operation, the newer
standards does not specify a specific maximum force but leaves this to the spe-
cific risk assesment. In general this means that regardless of the standard used a
risk assesment shall confirm that the collaborative robot installation is sufficiently
safe, and for most cases the combination of a well constructed robot installation
and the maximum force of 150N is sufficient.
3.4 Emergency situations
In the unlikely event of an emergency situation where one or more robot joints
needs to be moved and robot power is either not possible or unwanted, there
are three different ways to force movements of the robot joints without powering
the motors of the joints:
1. Active backdriving: If possible, power on the robot by pushing the ”ON”
button on the initializing screen. Instead of pushing the ”break release”
button to power up the joint motors, push the teach button on the back-
side of the teach pendant. A special backdrive mode is entered and the
robot will loosen its breacks automatically while the robot is hand guided.
Releasing the teach button re-locks the breaks.
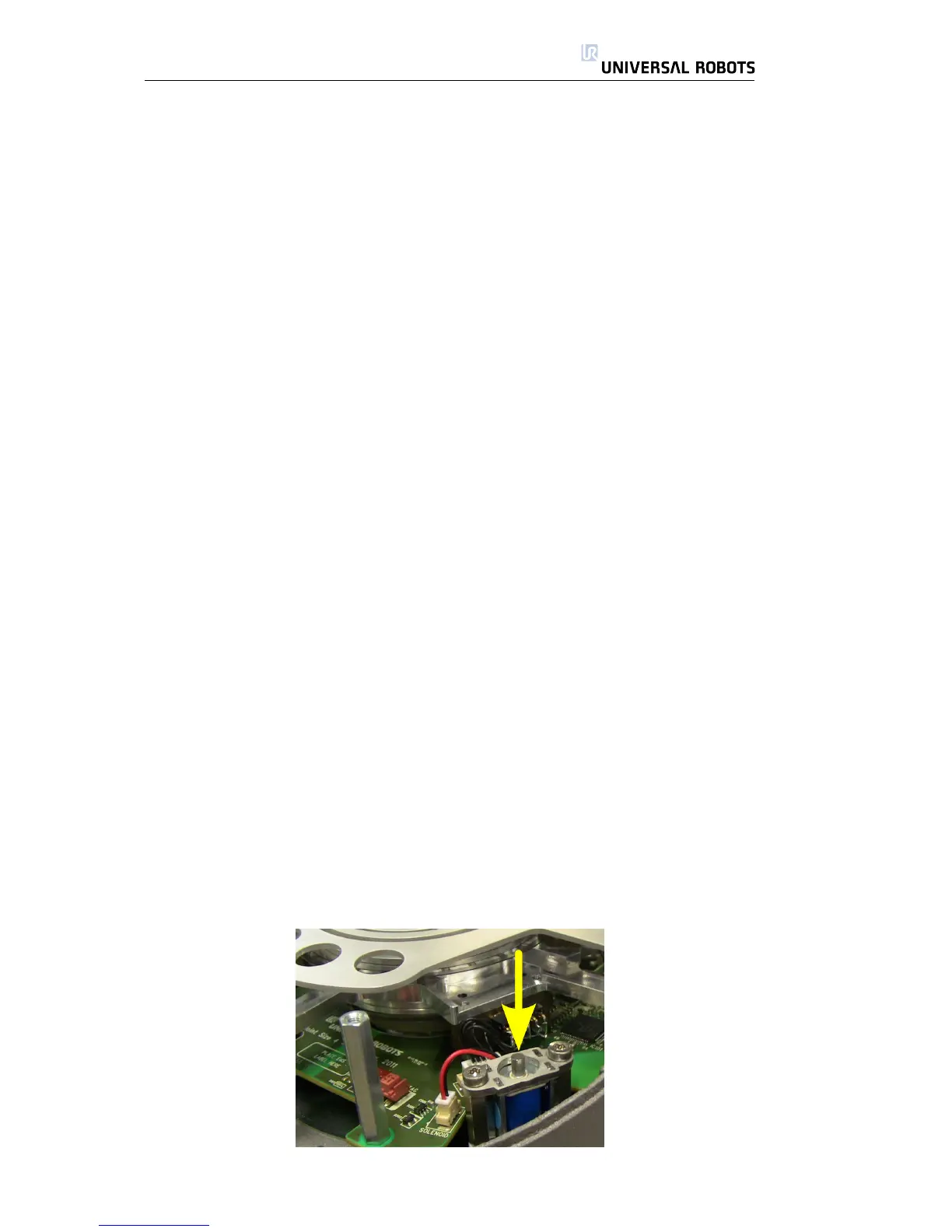
2. Manual break release: Remove the joint cover by removing the few M3
screws that fix it. Release the break by pushing the plunger on the small
electro magnet as shown in the picture below.
3. Forced backdriving: Force a joint to move by pulling hard in the robot arm.
Each joint break has a friction clutch which enables movement during high
forced torque. Forced backdriving is intended for urgent emergencies only
and might damage the joint gears and other parts.
Do not turn any joints more than necessary and beware of gravity and heavy
payloads.
All Rights Reserved
33 UR10

 Loading...
Loading...









