272 PROFINET IO – Start-up
The start sequence for the parameter example above is given
below.
Control word:
• Reset the fieldbus communication fault (if active).
• Enter 47Eh (1150 decimal) –> READY TO SWITCH ON.
• Enter 47Fh (1151 decimal) –> OPERATING (Speed mode).
Position control using the PROFIdrive communication
profile with PPO Type 4
This example shows how to configure a basic positioning
application. The start/stop commands and reference are according
to the PROFIdrive profile, positioning mode. For more information,
see the PROFIdrive state machine on page 313.
Note: By default, fieldbus is not the only control source. See actual
signal 02.12 FBA MAIN CW in ACSM1 Motion Control Program
Firmware Manual for details.
The position set point and velocity reference are defined as 32-bit
integer values; both are scaled as defined in the drive parameter
settings.
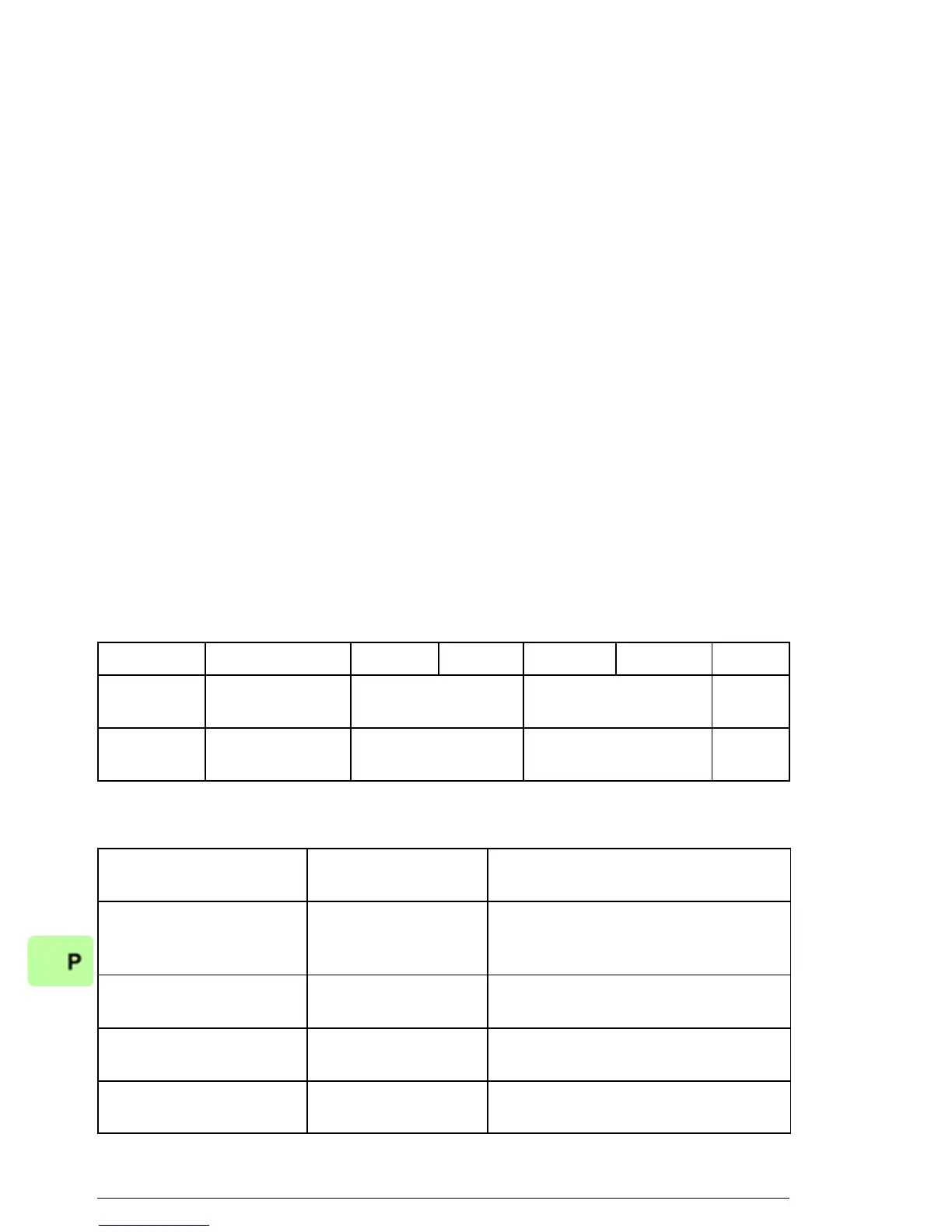
The table below gives the recommended drive parameter settings.
Direction PZD1 PZD2 PZD3 PZD4 PZD5 PZD6
Out Control word
(STW1)
Position set point Velocity reference N/A
In Status word
(ZSW1)
Position actual
value
Velocity actual value N/A
Drive parameter Setting for ACSM1
drives
Description
50.01 FBA ENABLE Enable Enables communication between
the drive and the fieldbus adapter
module.
50.02 COMM LOSS
FUNC
Fault Enables fieldbus communication
fault monitoring.
50.03 COMM LOSS T
OUT
3.0 s Defines the fieldbus communication
break supervision time.
50.04 FBA REF1
MODESEL
Position Selects the fieldbus reference 1
scaling.
 Loading...
Loading...